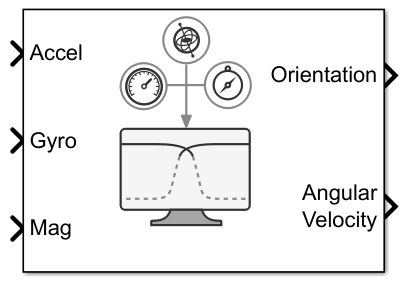
Complementary Filter
Libraries:
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Navigation Filters
Navigation Toolbox /
Multisensor Positioning /
Navigation Filters
Description
The Complementary Filter Simulink® block fuses accelerometer, magnetometer, and gyroscope sensor data to estimate device orientation.
Ports
Input
Accelerometer readings in the sensor body coordinate system in m/s2, specified as an N-by-3 matrix of real numbers. N is the number of samples, and the each row is of the form [x y z].
Data Types: single | double
Gyroscope readings in the sensor body coordinate system in rad/s, specified as an N-by-3 matrix of real numbers. N is the number of samples, and the each row is of the form [x y z].
Data Types: single | double
Magnetometer readings in the sensor body coordinate system in µT, specified as an N-by-3 matrix of real numbers. N is the number of samples, and the each row is of the form [x y z].
Dependencies
To enable this input port, select the Enable Magnetometer
input parameter.
Data Types: single | double
Output
Orientation of the sensor body frame relative to the navigation frame, returned as
an M-by-4 matrix of real numbers or a
3-by-3-by-M array. Each row of the M-by-4
matrix represents the four components of a quaternion. Each
page of the 3-by-3-by-M array represents a 3-by-3 rotation
matrix.
The number of input samples, N, determines the output size, M.
The output format depends on the value of the Orientation format
parameter.
Data Types: single | double
Angular velocity, with gyroscope bias removed, in the sensor body coordinate system in rad/s, returned as an M-by-3 matrix of real numbers.
The number of input samples, N, determines the output size, M.
Data Types: single | double
Parameters
Specify the navigation reference frame as NED (North-East-Down)
or ENU (East-North-Up).
Specify the format in which to output Orientation as
quaternion or Rotation
matrix:
quaternion—Orientationoutputs an M-by-4 matrix of real numbers. Each row of the matrix represents the four components of aquaternion.Rotation matrix—Orientationoutputs a 3-by-3-by-M array, in which each page of the array is a 3-by-3 rotation matrix.
The number of input samples, N, determines the output size, M.
Specify the accelerometer gain as a real scalar in the range [0, 1]. The gain determines how much the block trust the accelerometer measurement over the gyroscope measurement for orientation estimation.
Example: 0.02
Data Types: single | double
Select this parameter to enable input of magnetometer readings at the Mag port.
Specify the magnetometer gain as a real scalar in the range [0, 1]. The gain determines how much the block trust the magnetometer measurement over the gyroscope measurement for orientation estimation.
Example: 0.02
Data Types: single | double
Select the type of simulation to run from these options:
Interpreted execution— Simulate the model using the MATLAB® interpreter. This option shortens startup time, but has a slower simulation speed thanCode generation. In this mode, you can debug the source code of the block.Code generation— Simulate the model using generated C code. The first time you run a simulation in this mode, Simulink generates C code for the block. Simulink reuses the C code for subsequent simulations, as long as the model does not change. This option requires additional startup time, but the speed of subsequent simulations is comparable toInterpreted execution.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2023a
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
选择网站
选择网站以获取翻译的可用内容,以及查看当地活动和优惠。根据您的位置,我们建议您选择:。
您也可以从以下列表中选择网站:
如何获得最佳网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他 MathWorks 国家/地区网站并未针对您所在位置的访问进行优化。
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)