gpsSensor
GPS receiver simulation model
Description
The gpsSensor
System object™ models data output from a Global Positioning System (GPS) receiver. The object
models the position noise as a first order Gauss Markov process, in which the sigma values are
specified in the HorizontalPositionAccuracy and the
VerticalPositionAccuracy properties. The object models the velocity
noise as Gaussian noise with its sigma value specified in the
VelocityAccuracy property.
To model a GPS receiver:
Create the
gpsSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
GPS = gpsSensorgpsSensor
System object that computes a Global Positioning System receiver reading based on a local
position and velocity input signal. The default reference position in geodetic coordinates is
latitude: 0o N
longitude: 0o E
altitude: 0 m
GPS = gpsSensor('ReferenceFrame',RF)gpsSensor
System object that computes a global positioning system receiver reading relative to the
reference frame RF.
GPS = gpsSensor(___,
sets one or more properties using name-value arguments in addition to any of the previous
input arguments.Name=Value)
Input Arguments
Properties
Usage
Description
[
computes global navigation satellite system receiver readings from the position and
velocity inputs.position,velocity,groundspeed,course] = GPS(truePosition,trueVelocity)
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a gpsSensor System object™ to model GPS receiver data. Assume a typical one Hz sample rate and a 1000-second simulation time. Define the reference location in terms of latitude, longitude, and altitude (LLA) of Natick, MA (USA). Define the sensor as stationary by specifying the true position and velocity with zeros.
fs = 1; duration = 1000; numSamples = duration*fs; refLoc = [42.2825 -71.343 53.0352]; truePosition = zeros(numSamples,3); trueVelocity = zeros(numSamples,3); gps = gpsSensor('SampleRate',fs,'ReferenceLocation',refLoc);
Call gps with the specified truePosition and trueVelocity to simulate receiving GPS data for a stationary platform.
position = gps(truePosition,trueVelocity);
Plot the true position and the GPS sensor readings for position.
t = (0:(numSamples-1))/fs; subplot(3, 1, 1) plot(t, position(:,1), ... t, ones(numSamples)*refLoc(1)) title('GPS Sensor Readings') ylabel('Latitude (degrees)') subplot(3, 1, 2) plot(t, position(:,2), ... t, ones(numSamples)*refLoc(2)) ylabel('Longitude (degrees)') subplot(3, 1, 3) plot(t, position(:,3), ... t, ones(numSamples)*refLoc(3)) ylabel('Altitude (m)') xlabel('Time (s)')
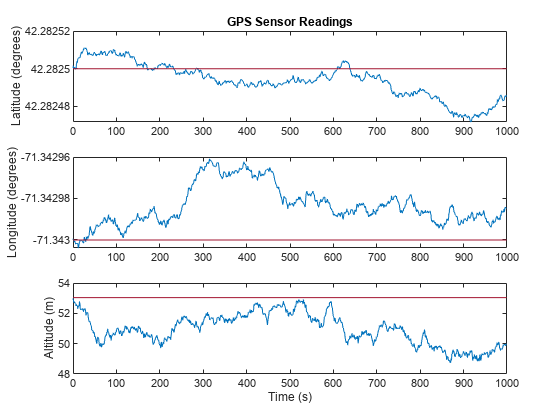
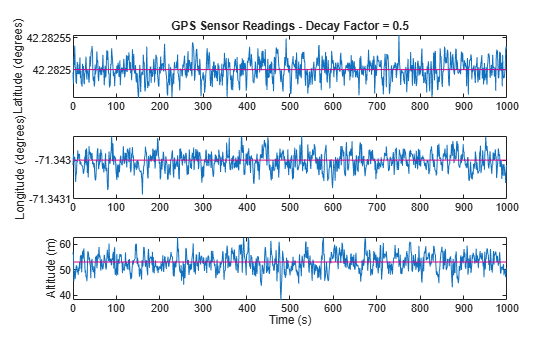
The position readings have noise controlled by HorizontalPositionAccuracy, VerticalPositionAccuracy, VelocityAccuracy, and DecayFactor. The DecayFactor property controls the drift in the noise model. By default, DecayFactor is set to 0.999, which approaches a random walk process. To observe the effect of the DecayFactor property:
Reset the
gpsobject.Set
DecayFactorto0.5.Call
gpswith variables specifying a stationary position.Plot the results.
The GPS position readings now oscillate around the true position.
reset(gps) gps.DecayFactor = 0.5; position = gps(truePosition,trueVelocity); subplot(3, 1, 1) plot(t, position(:,1), ... t, ones(numSamples)*refLoc(1)) title('GPS Sensor Readings - Decay Factor = 0.5') ylabel('Latitude (degrees)') subplot(3, 1, 2) plot(t, position(:,2), ... t, ones(numSamples)*refLoc(2)) ylabel('Longitude (degrees)') subplot(3, 1, 3) plot(t, position(:,3), ... t, ones(numSamples)*refLoc(3)) ylabel('Altitude (m)') xlabel('Time (s)')
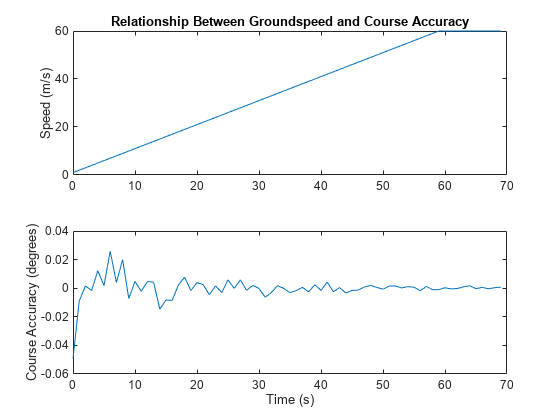
GPS receivers achieve greater course accuracy as groundspeed increases. In this example, you create a GPS receiver simulation object and simulate the data received from a platform that is accelerating from a stationary position.
Create a default gpsSensor System object™ to model data returned by a GPS receiver.
GPS = gpsSensor
GPS =
gpsSensor with properties:
SampleRate: 1 Hz
PositionInputFormat: 'Local'
ReferenceLocation: [0 0 0] [deg deg m]
HorizontalPositionAccuracy: 1.6 m
VerticalPositionAccuracy: 3 m
VelocityAccuracy: 0.1 m/s
RandomStream: 'Global stream'
DecayFactor: 0.999
Create matrices to describe the position and velocity of a platform in the NED coordinate system. The platform begins from a stationary position and accelerates to 60 m/s North-East over 60 seconds, then has a vertical acceleration to 2 m/s over 2 seconds, followed by a 2 m/s rate of climb for another 8 seconds. Assume a constant velocity, such that the velocity is the simple derivative of the position.
duration = 70; numSamples = duration*GPS.SampleRate; course = 45*ones(duration,1); groundspeed = [(1:60)';60*ones(10,1)]; Nvelocity = groundspeed.*sind(course); Evelocity = groundspeed.*cosd(course); Dvelocity = [zeros(60,1);-1;-2*ones(9,1)]; NEDvelocity = [Nvelocity,Evelocity,Dvelocity]; Ndistance = cumsum(Nvelocity); Edistance = cumsum(Evelocity); Ddistance = cumsum(Dvelocity); NEDposition = [Ndistance,Edistance,Ddistance];
Model GPS measurement data by calling the GPS object with your velocity and position matrices.
[~,~,groundspeedMeasurement,courseMeasurement] = GPS(NEDposition,NEDvelocity);
Plot the groundspeed and the difference between the true course and the course returned by the GPS simulator.
As groundspeed increases, the accuracy of the course increases. Note that the velocity increase during the last ten seconds has no effect, because the additional velocity is not in the ground plane.
t = (0:numSamples-1)/GPS.SampleRate; subplot(2,1,1) plot(t,groundspeed); ylabel('Speed (m/s)') title('Relationship Between Groundspeed and Course Accuracy') subplot(2,1,2) courseAccuracy = courseMeasurement - course; plot(t,courseAccuracy) xlabel('Time (s)'); ylabel('Course Accuracy (degrees)')
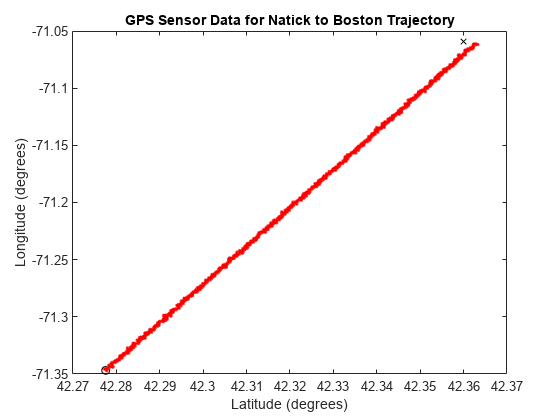
Simulate GPS data received during a trajectory from the city of Natick, MA, to Boston, MA.
Define the decimal degree latitude and longitude for the city of Natick, MA USA, and Boston, MA USA. For simplicity, set the altitude for both locations to zero.
NatickLLA = [42.27752809999999, -71.34680909999997, 0]; BostonLLA = [42.3600825, -71.05888010000001, 0];
Define a motion that can take a platform from Natick to Boston in 20 minutes. Set the origin of the local NED coordinate system as Natick. Create a waypointTrajectory object to output the trajectory 10 samples at a time.
fs = 1; duration = 60*20; bearing = 68; % degrees distance = 25.39e3; % meters distanceEast = distance*sind(bearing); distanceNorth = distance*cosd(bearing); NatickNED = [0,0,0]; BostonNED = [distanceNorth,distanceEast,0]; trajectory = waypointTrajectory( ... 'Waypoints', [NatickNED;BostonNED], ... 'TimeOfArrival',[0;duration], ... 'SamplesPerFrame',10, ... 'SampleRate',fs);
Create a gpsSensor object to model receiving GPS data for the platform. Set the HorizontalPositionalAccuracy to 25 and the DecayFactor to 0.25 to emphasize the noise. Set the ReferenceLocation to the Natick coordinates in LLA.
GPS = gpsSensor( ... 'HorizontalPositionAccuracy',25, ... 'DecayFactor',0.25, ... 'SampleRate',fs, ... 'ReferenceLocation',NatickLLA);
Open a figure and plot the position of Natick and Boston in LLA. Ignore altitude for simplicity.
In a loop, call the gpsSensor object with the ground-truth trajectory to simulate the received GPS data. Plot the ground-truth trajectory and the model of received GPS data.
figure(1) plot(NatickLLA(1),NatickLLA(2),'ko', ... BostonLLA(1),BostonLLA(2),'kx') xlabel('Latitude (degrees)') ylabel('Longitude (degrees)') title('GPS Sensor Data for Natick to Boston Trajectory') hold on while ~isDone(trajectory) [truePositionNED,~,trueVelocityNED] = trajectory(); reportedPositionLLA = GPS(truePositionNED,trueVelocityNED); figure(1) plot(reportedPositionLLA(:,1),reportedPositionLLA(:,2),'r.') end
As a best practice, release System objects when complete.
release(GPS) release(trajectory)
Extended Capabilities
Version History
Introduced in R2018b