estimateStates
Syntax
Description
estimates = estimateStates(filter,sensorData,measurementNoise)sensorData and fuses data from each column of
the table one by one.
[
additionally returns the smoothed state estimates by using the Rauch-Tung-Striebel (RTS)
nonlinear Kalman smoother. For algorithm details, see Algorithms and [1].estimates,smoothEstimates] = estimateStates(___)
Tip
Smoothing usually requires considerably more memory and computation time. Use this syntax only when you need the smoothed estimated states.
Examples
Load measurement data from an accelerometer and a gyroscope.
load("accelGyroINSEKFData.mat");Create an insEKF filter object. Specify the orientation part of the state in the filter using the initial orientation from the measurement data. Specify the diagonal elements of the state estimate error covariance matrix corresponding to the orientation state as 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Specify the measurement noise and the additive process noise. You can obtain these values by using the tune object function of the filter object.
measureNoise = struct("AccelerometerNoise", 0.1739, ... "GyroscopeNoise", 1.1129); processNoise = diag([ ... 2.8586 1.3718 0.8956 3.2148 4.3574 2.5411 3.2148 0.5465 0.2811 ... 1.7149 0.1739 0.7752 0.1739]); filt.AdditiveProcessNoise = processNoise;
Batch-estimate the states using the estimateStates object function. Also, obtain the estimates after smoothing.
[estimates,smoothEstimates] = estimateStates(filt,sensorData,measureNoise);
Visualize the estimated orientation in Euler angles.
figure t = estimates.Properties.RowTimes; plot(t,eulerd(estimates.Orientation,"ZYX","frame")); title("Estimated Orientation"); ylabel("Degrees")

Visualize the estimated orientation after smoothing in Euler angles.
figure plot(t,eulerd(smoothEstimates.Orientation,"ZYX","frame")); title("Smoothed Orientation"); ylabel("Degrees")

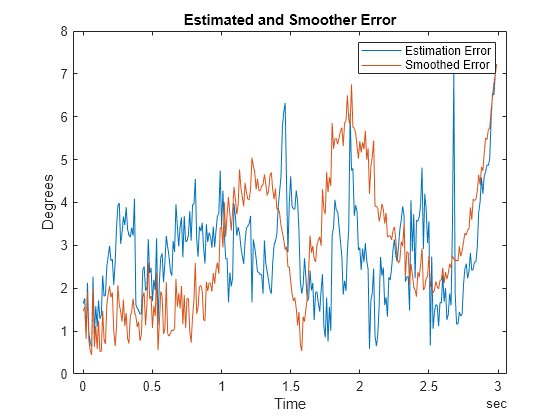
Visualize the estimate error, in quaternion distance, using the dist object function of the quaternion object.
trueOrient = groundTruth.Orientation; plot(t,rad2deg(dist(estimates.Orientation, trueOrient)), ... t,rad2deg(dist(smoothEstimates.Orientation, trueOrient))); title("Estimated and Smoother Error"); legend("Estimation Error","Smoothed Error") xlabel("Time"); ylabel("Degrees")
Input Arguments
Output Arguments
Algorithms
References
[1] Crassidis, John L., and John L. Junkins. "Optimal Estimation of Dynamic Systems". 2nd ed, CRC Press, pp. 349- 352, 2012.
Extended Capabilities
Version History
Introduced in R2022aSee Also
predict | fuse | residual | correct | stateparts | statecovparts | stateinfo | tune | createTunerCostTemplate | tunerCostFcnParam