smootherJIPDA
Description
Based on the joint integrated probabilistic data association (JIPDA) algorithm,
the smootherJIPDA object creates a multi-sensor multi-object fixed-interval
smoother that you can use for offline estimation of multiple objects. The smoother estimates
smoothing joint data association probabilities at each time step. These smoothing joint
association probabilities represent the data association between estimated tracks and
detections at time step k, given information from the preceding time steps
(1 to k-1) as well as succeeding time steps (k+1 to
N), where N is the total number of steps. By using
measurements from succeeding time steps, the smoother can estimate data associations at each
step more accurately and can resolve ambiguities more efficiently than a trackerJPDA object. For more details, see Algorithms.
Creation
Description
smoother = smootherJIPDAsmootherJIPDA object. Use the smooth
object function to obtain smoothed tracks.
smoother = smootherJIPDA(Name=Value)
smoother = smootherJIPDA(tracker)smootherJIPDA object by reusing the detection-to-track assignment
properties of a trackerJPDA object. You must set
the TrackLogic property of the trackerJPDA object
to "Integrated".
Properties
Object Functions
smooth | Smooth track estimates using JIPDA |
Examples
Load recorded detections and truth log.
load("smootherDetectionData.mat","detectionLog","timestamps","truthLog")
Create a smootherJIPDA object and set its FilterInitializtionFcn property to initialize a trackingEKF object with a constant velocity model.
smoother = smootherJIPDA(FilterInitializationFcn="initcvekf");Obtain the smoothed tracks by using the smooth object function. Use the time stamps input to let the smoother output smoothed tracks at these stamps.
smoothTracks = smooth(smoother,detectionLog,timestamps);
To compare the smoothed results with an online tracking JIPDA algorithm, create a trackerJPDA object, update the tracker with detections, and obtain tracks.
tracker = trackerJPDA("TrackLogic","Integrated","FilterInitializationFcn","initcvekf"); detectionTimes = cellfun(@(x)x.Time,detectionLog); onlineTracks = cell(numel(timestamps),1); for i = 1:numel(timestamps) detections = detectionLog(detectionTimes == timestamps(i)); onlineTracks{i} = tracker(detections,timestamps(i)); end
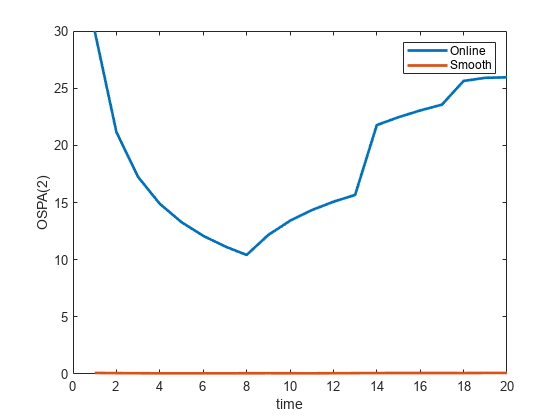
Compare tracking performances using the OSPA(2) metric. In this case, the smoother results have a much lower OSPA(2) metric and thus show better tracking performance than online tracking.
ospaOnlineCalc = trackOSPAMetric(Metric="OSPA(2)"); ospaSmoothCalc = trackOSPAMetric(Metric="OSPA(2)"); ospaOnline = zeros(numel(timestamps),1); ospaSmooth = zeros(numel(timestamps),1); for i = 1:numel(timestamps) ospaOnline(i) = ospaOnlineCalc(onlineTracks{i},truthLog{i}); ospaSmooth(i) = ospaSmoothCalc(smoothTracks{i},truthLog{i}); end % Plot OSPA(2) metrics plot(timestamps, [ospaOnline ospaSmooth],"LineWidth",2); xlabel("time"); ylabel("OSPA(2)"); legend({"Online","Smooth"});
Create a trackerJPDA object and set it track logic to "Integrated". Set its MaxNumEvents property to 50.
tracker = trackerJPDA(TrackLogic="Integrated",MaxNumEvents=50);Create a smootherJIPDA object based on the tracker. From the results, the MaxNumDetectionAssignmentEvents property is 50 as expected.
smoother = smootherJIPDA(tracker)
smoother =
smootherJIPDA with properties:
SmootherIndex: 0
AnalysisFcn: ''
FilterInitializationFcn: 'initcvekf'
MaxNumTracks: 100
MaxNumSensors: 20
TimeTolerance: 1.0000e-05
DetectionAssignmentThreshold: [30 Inf]
TrackAssignmentThreshold: 100
MaxNumDetectionAssignmentEvents: 50
MaxNumTrackAssignmentEvents: Inf
InitializationThreshold: 0
DetectionProbability: 0.9000
ClutterDensity: 1.0000e-06
NewTargetDensity: 1.0000e-05
DeathRate: 0.0100
ConfirmationThreshold: 0.9500
DeletionThreshold: 0.1000
ClassFusionMethod: 'None'
Algorithms
The smootherJIPDA object goes through multiple steps to obtain the smoothed
tracks. Consider a time period from time t0 to
tN. In this period, the
smoother is provided with detections at each k-th step, where
k = 0, 1, …, N.
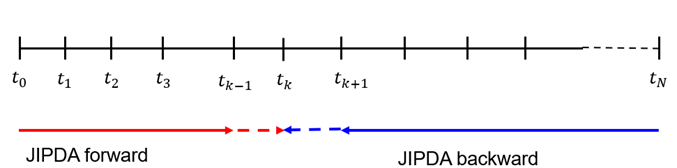
To obtain the smoothed tracks for all the time stamps:
The smoother first performs forward JIPDA tracking by using detections from t0 to tk-1 to obtain tracks at tk-1. The smoother then predicts those tracks to time tk to get forward predictions at tk.
The smoother then performs backward JIPDA tracking from tN to tk+1 to obtain tracks at tk+1. The smoother also predicts those tracks backward to time tk to get backward predictions at tk.
Next, for time step tk, the smoother performs JIPDA between forward predictions and backward predictions and obtain smoothing (merged) predictions at time tk. The smoother also maintains track identities when merging forward and backward predictions.
Again for time step tk, the smoother performs JIPDA between the obtained smoothing predictions at tk and the detections at tk. The smoother saves the association results called smoothing data associations for later use.
The smoother repeats steps 1 to 4 for all k = 0, 1, …, N.
Next, the smoother updates the forward predictions to from time t0 to tk. In the process, the smoother exactly follows the smoothing data associations when associating tracks to detections.
The smoother repeats step 6 for all k = 0, 1, …, N.
Finally, the smoother performs Rauch-Tung-Striebel (RTS) smoothing for all the obtained tracks in the time period of [t0, tN] and outputs the smoothed tracks.
References
[1] Song, Taek Lyul, and Darko Mušicki. “Smoothing Innovations and Data Association with IPDA.” Automatica, vol. 48, no. 7, July 2012, pp. 1324–29.
[2] Kim, Tae Han, et al. “Smoothing Joint Integrated Probabilistic Data Association.” IET Radar, Sonar & Navigation, vol. 9, no. 1, Jan. 2015, pp. 62–66.
[3] Memon, Sufyan, et al. “Efficient Smoothing for Multiple Maneuvering Targets in Heavy Clutter.” 2016 International Conference on Control, Automation and Information Sciences (ICCAIS), IEEE, 2016, pp. 249–54.
Version History
Introduced in R2023a