staticDetectionFuser
Static fusion of synchronous sensor detections
Description
staticDetectionFuser
System object™ creates a static detection fuser object to fuse angle-only sensor
detections.
To obtain the fuser:
Create the
staticDetectionFuserobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
fuser = staticDetectionFuser()
fuser = staticDetectionFuser(Name,Value)fuser =
staticDetectionFuser('FalseAlarmRate',1e-6,'MaxNumSensors',12) creates a fuser
that has a maximum of 12 sensors and a false alarm rate of 1e-6.
Enclose each property name in quotes.
Properties
Usage
Description
compositeDets = fuser(dets)compositeDets, of input detections,
dets.
[
also returns analysis information, compositeDets,analysisInfo] = fuser(dets)analysisInfo.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
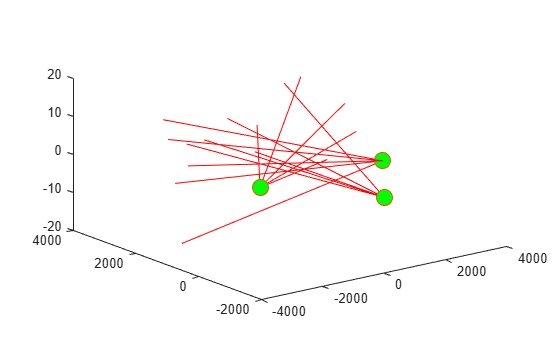
Fuse angle-only detections from three ESM sensors.
Load stored detections from the sensors.
load('angleOnlyDetectionFusion.mat','detections');
Visualize angle-only detections for plotting the direction vector.
rPlot = 5000; plotData = zeros(3,numel(detections)*3); for i = 1:numel(detections) az = detections{i}.Measurement(1); el = detections{i}.Measurement(2); [xt,yt,zt] = sph2cart(deg2rad(az),deg2rad(el),rPlot); % The sensor is co-located at platform center, therefore use % the position from the second measurement parameter originPos = detections{i}.MeasurementParameters(2).OriginPosition; positionData(:,i) = originPos(:); plotData(:,3*i-2) = [xt;yt;zt] + originPos(:); plotData(:,3*i-1) = originPos(:); plotData(:,3*i) = [NaN;NaN;NaN]; end plot3(plotData(1,:),plotData(2,:),plotData(3,:),'r-') hold on plot3(positionData(1,:),positionData(2,:),positionData(3,:),'o','MarkerSize',12,'MarkerFaceColor','g')
Create a staticDetectionFuser to fuse angle-only detections using the measurement fusion function triangulateLOS.
fuser = staticDetectionFuser('MeasurementFusionFcn','triangulateLOS','MaxNumSensors',3)
fuser =
staticDetectionFuser with properties:
FusedSensorIndex: 1
MeasurementFusionFcn: 'triangulateLOS'
MeasurementFormat: 'Position'
MaxNumSensors: 3
Volume: [3×1 double]
DetectionProbability: [3×1 double]
FalseAlarmRate: [3×1 double]
TimeTolerance: 1.0000e-06
UseParallel: false
Create the fused detections and obtain the analysis information.
[fusedDetections, analysisInfo] = fuser(detections); fusedPositions = zeros(3,numel(fusedDetections)); for i = 1:numel(fusedDetections) fusedPositions(:,i) = fusedDetections{i}.Measurement; end plot3(fusedPositions(1,:),fusedPositions(2,:),fusedPositions(3,:),'ko', ... 'MarkerSize',12, 'MarkerFaceColor','k') legend('Angle-only Detections','Sensor Positions','Fused Target Measurements') title('Angle-only Detection Fusion') xlabel('x [m]') ylabel('y [m]') view(2)
![Figure contains an axes object. The axes object with title Angle-only Detection Fusion, xlabel x [m], ylabel y [m] contains 3 objects of type line. One or more of the lines displays its values using only markers These objects represent Angle-only Detections, Sensor Positions, Fused Target Measurements.](../../examples/fusion/win64/FuseAngleOnlyDetectionsTitleExample_02.png)
Use the analysisInfo output to check the assignments.
analysisInfo.Assignments
ans = 6×3 uint32 matrix
0 10 14
1 6 11
2 7 12
3 8 13
4 9 0
5 0 15
Algorithms
References
[1] Bar-Shalom, Yaakov, Peter K. Willett, and Xin Tian. Tracking and data fusion. Storrs, CT, USA:: YBS publishing, 2011.
Extended Capabilities
Version History
Introduced in R2018b