解决具有整数和非线性约束的非线性问题
surrogateopt 求解器同时接受整数约束和非线性约束。比较具有和不具有整数约束的非线性问题的解。整数约束使得解位于合理精细的网格上。
目标函数和约束函数
目标函数为
该目标函数是非负的,在点 = [1.3333, 1.0370] 处取最小值 0。
该问题有两个非线性约束函数。
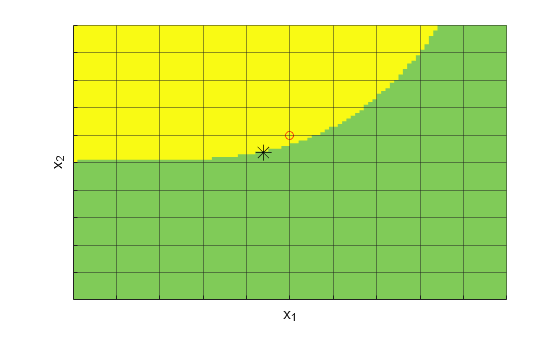
绘制非线性约束的可行区域。
[X,Y] = meshgrid(-2:.01:3); Z = (5*sinh(Y./5) >= X.^4); % Z=1 where the first constraint is satisfied, Z=0 otherwise Z = Z+ 2*(5*tanh(X./5) >= Y.^2 - 1); % Z=2 where the second constraint is satisfied % Z=3 where both constraints are satisfied surf(X,Y,Z,'LineStyle','none'); fig = gcf; fig.Color = 'w'; % white background view(0,90) xlabel('x_1') ylabel('x_2')
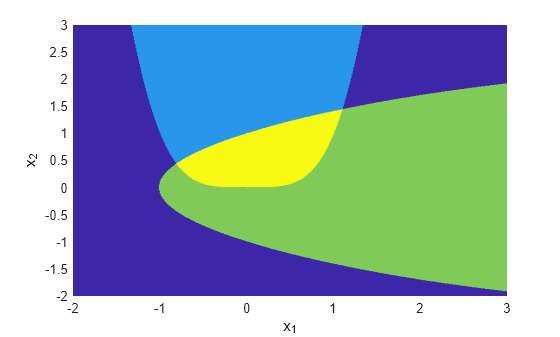
黄色区域显示两个约束均得到满足的地方。
surrogateopt 要求目标函数和约束函数是同一函数的一部分,即返回结构体的函数。目标函数位于结构体的 Fval 字段中,约束位于 Ineq 字段中。这些字段是本示例末尾的 objconstr 函数的输出。
将整数约束缩放至细网格上
将问题设置为在两个变量 x(1) 和 x(2) 中都有整数约束。
intcon = [1 2];
缩放问题,以便变量按 s = 1/10 缩放,其中 s 与变量相乘。
s = 0.1; f = @(x)objconstr(x,s);
为了使此缩放有效,您需要将边界缩放 。将未缩放的边界设置为 ,并将每个边界缩放至 。
lb = [-2,-2]/s; ub = [3,3]/s;
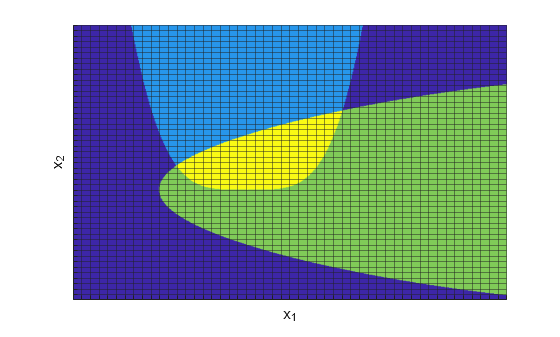
通过使用缩放 s,该问题实际上在每个分量 s 和 x(1) 中都有 x(2) 的间距。将整数点绘制为间距为 s 的网格。
hold on grid on ax = gca; sp = -2:s:3; ax.XTick = sp; ax.YTick = sp; ax.Layer = 'top'; ax.GridAlpha = 1/2; ax.XTickLabel = ''; ax.YTickLabel = ''; xlabel('x_1') ylabel('x_2') hold off
解决扩展问题
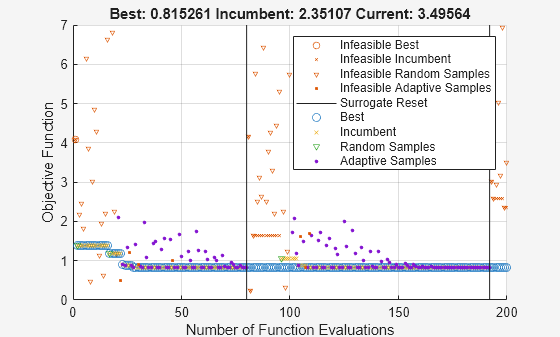
设置选项以使用比默认值更严格的约束,并使用 surrogateoptplot 绘图函数。
opts = optimoptions('surrogateopt','PlotFcn',"surrogateoptplot","ConstraintTolerance",1e-6);
调用 surrogateopt 以求解问题。
rng default % For reproducibility [sol,fval,eflag,outpt] = surrogateopt(f,lb,ub,intcon,opts)
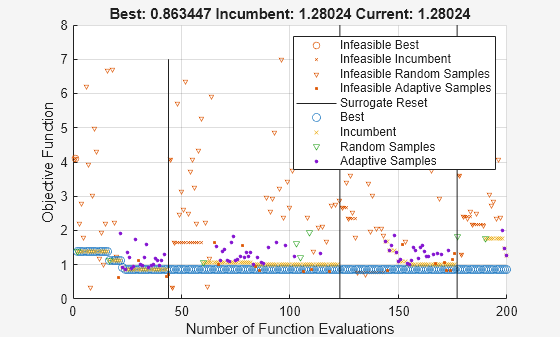
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
sol = 1×2
5 1
fval = 0.8634
eflag = 0
outpt = struct with fields:
elapsedtime: 21.1406
funccount: 200
constrviolation: -0.0375
ineq: [-0.0375 -1.4883]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
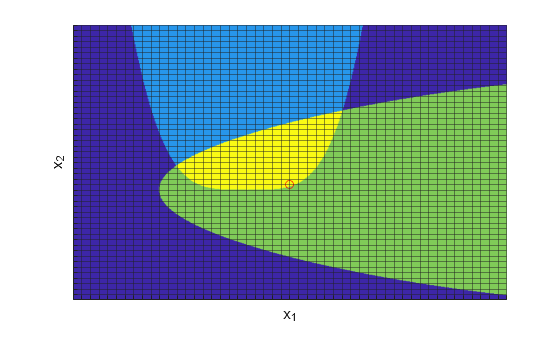
在图中将解绘制为红色圆圈。请注意,目标函数值约为 0.86。
figure(fig); hold on plot3(sol(1)*s,sol(2)*s,5,'ro') hold off
与没有整数约束的解进行比较
将具有整数约束的解与不具有整数约束的解进行比较。
[sol2,fval2,eflag2,outpt2] = surrogateopt(f,lb,ub,[],opts)
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
sol2 = 1×2
4.3882 0.3709
fval2 = 0.8153
eflag2 = 0
outpt2 = struct with fields:
elapsedtime: 12.8922
funccount: 200
constrviolation: -1.2426e-05
ineq: [-1.2426e-05 -1.4363]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
这里,目标函数值约为 0.815。整数约束使目标函数值增加不到 10%。绘制新解与前一个整数解。放大以更清楚地看到解点。
figure(fig) hold on plot3(sol2(1)*s,sol2(2)*s,5,'k*','MarkerSize',12) xlim([0 1]) ylim([-1/2 1/2]) hold off
辅助函数
以下代码创建 objconstr 辅助函数。该函数将变量 x 乘以因子 s,在 F 结构体的 Fval 字段中返回目标函数值,在 F 结构体的 Ineq 字段中返回非线性约束。
function F = objconstr(x,s) x = x*s; fun = log(1 + 3*(x(2) - (x(1)^3 - x(1)))^2 + (x(1) - 4/3)^2); c1 = x(1)^4 - 5*sinh(x(2)/5); c2 = x(2)^2 - 5*tanh(x(1)/5) - 1; c = [c1 c2]; F.Fval = fun; F.Ineq = c; end