细化起点
关于优化起点
如果问题的某些分量无约束,GlobalSearch 和 MultiStart 将使用人工边界在每个分量中均匀地生成随机起点。但是,如果您的问题具有遥远的极小值,则需要广泛分散的起点来找到这些极小值。
使用这些方法可以获得广泛分散的起点:
在您的
problem结构体中给出广泛分离的边界。将
RandomStartPointSet对象与MultiStart算法一起使用。在RandomStartPointSet对象中设置ArtificialBound属性的一个较大值。将
CustomStartPointSet对象与MultiStart算法一起使用。使用广泛分散的起点。
每种方法都有优点和缺点。
| 方法 | 优点 | 缺点 |
|---|---|---|
在 problem 中给出边界 | 自动生成点 | 制作更复杂的 Hessian |
可与 GlobalSearch 结合使用 | 不清楚该把边界设多大 | |
| 容易做到 | 变化 problem | |
| 边界可能不对称 | 仅限均匀点 | |
RandomStartPointSet 中的大 ArtificialBound | 自动生成点 | 仅限于 MultiStart |
不改变 problem | 仅限对称、均匀的点 | |
| 容易做到 | 不清楚 ArtificialBound 应该设置多大 | |
CustomStartPointSet | 可自定义 | 仅限于 MultiStart |
不改变 problem | 需要编程来生成点 |
生成起点的方法
均匀网格
要生成均匀的起点网格:
使用
ndgrid生成多维数组。给出每个分量的下界、间距和上界。例如,要生成一组三维数组
第一个分量从 -2 到 0,间距为 0.5
第二个分量从 0 到 2,间距 0.25
第三个分量从 -10 到 5,间距 1
[X,Y,Z] = ndgrid(-2:.5:0,0:.25:2,-10:5);
将数组放入单个矩阵中,每行代表一个起点。例如:
W = [X(:),Y(:),Z(:)];
在这个例子中,
W是一个 720×3 的矩阵。将矩阵放入
CustomStartPointSet对象中。例如:custpts = CustomStartPointSet(W);
以 CustomStartPointSet 对象作为第三个输入来调用 run。例如,
% Assume problem structure and ms MultiStart object exist
[x,fval,flag,outpt,manymins] = run(ms,problem,custpts);扰动网格
与稍微受干扰的起点相比,整数起点可能产生不太稳健的解。
要获得一组扰动的起点:
以 CustomStartPointSet 对象作为第三个输入来调用 run。例如,
% Assume problem structure and ms MultiStart object exist
[x,fval,flag,outpt,manymins] = run(ms,problem,custpts);不受约束的组件的点分布广泛
问题的某些分量可能缺少下界。例如:
尽管没有明确的边界,但还是存在着分量无法达到的水平。例如,如果一个分量代表一颗钻石的重量,则隐含的上界是 1 公斤(希望钻石的重量低于 10 克)。在这种情况下,给出隐式边界作为上界。
确实没有上界。例如,计算机文件的大小(以字节为单位)没有有效的上界。如今最大的规模可以是千兆字节或兆兆字节,但 10 年后,谁知道呢?
对于真正无界分量,可以使用以下采样方法。要在每个区域 (exp(n),exp(n+1)) 中生成大约 1/n 个点,请使用以下公式。如果 u 是随机的并且从 0 到 1 均匀分布,那么 r = 2u – 1 就是在 -1 和 1 之间均匀分布。取
y 是对称且随机的。对于由 lb 限定的变量,取
类似地,对于 ub 上方有界的变量,取
例如,假设您有一个三维问题
x(1) > 0x(2) < 100x(3) 无约束
为了使 150 个起点满足以下约束:
u = rand(150,3); r1 = 1./u(:,1); r1 = exp(r1) - exp(1); r2 = 1./u(:,2); r2 = -exp(r2) + exp(1) + 100; r3 = 1./(2*u(:,3)-1); r3 = sign(r3).*(exp(abs(r3)) - exp(1)); custpts = CustomStartPointSet([r1,r2,r3]);
以下是该算法的变体。通过下界方法生成一个介于 0 和无穷大之间的数字。使用该数字作为点的半径。通过对每个分量取随机数并乘以半径来生成该点的其他分量。您可以在乘以半径之前对随机数进行标准化,因此它们的范数为 1。有关此方法的实际示例,请参阅 没有边界且起点分布广泛的 MultiStart。
示例:寻找更好的解
MultiStart 无法在 寻找全局或多个局部最小值 中找到全局最小值。有两种简单的方法可以寻找更好的解:
使用更多起点
给搜索空间设定更严格的边界
设置问题结构体和MultiStart对象:
problem = createOptimProblem('fminunc',... 'objective',@(x)sawtoothxy(x(1),x(2)),... 'x0',[100,-50],'options',... optimoptions(@fminunc,'Algorithm','quasi-newton')); ms = MultiStart;
使用更多起点
对问题运行 MultiStart,得到 200 个起点,而不是 50 个:
rng(14,'twister') % for reproducibility [x,fval,exitflag,output,manymins] = run(ms,problem,200)
MultiStart completed some of the runs from the start points.
53 out of 200 local solver runs converged with a positive local solver exit flag.
x =
1.0e-06 *
-0.2284 -0.5567
fval =
2.1382e-12
exitflag =
2
output =
struct with fields:
funcCount: 32670
localSolverTotal: 200
localSolverSuccess: 53
localSolverIncomplete: 147
localSolverNoSolution: 0
message: 'MultiStart completed some of the runs from the start points.↵↵53 out of 200 local solver runs converged with a positive local solver exit flag.'
manymins =
1x53 GlobalOptimSolution
Properties:
X
Fval
Exitflag
Output
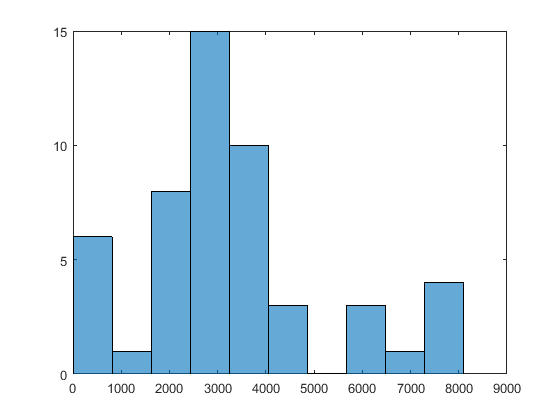
X0这次 MultiStart 找到了全局最小值,并找到了 51 个局部极小值。
要查看局部解的范围,请输入 histogram([manymins.Fval],10)。
更加严格的起点约束
假设您认为有趣的局部解的所有分量的绝对值都小于 100。起点边界的默认值为 1000。要使用不同的边界值,请生成一个 RandomStartPointSet,并将 ArtificialBound 属性设置为 100:
startpts = RandomStartPointSet('ArtificialBound',100,... 'NumStartPoints',50); [x,fval,exitflag,output,manymins] = run(ms,problem,startpts)
MultiStart completed some of the runs from the start points.
29 out of 50 local solver runs converged with a positive local solver exit flag.
x =
1.0e-08 *
0.9725 -0.6198
fval =
1.4955e-15
exitflag =
2
output =
struct with fields:
funcCount: 7431
localSolverTotal: 50
localSolverSuccess: 29
localSolverIncomplete: 21
localSolverNoSolution: 0
message: 'MultiStart completed some of the runs from the start points.↵↵29 out of 50 local solver runs converged with a positive local solver exit flag.'
manymins =
1x25 GlobalOptimSolution
Properties:
X
Fval
Exitflag
Output
X0MultiStart 找到了全局最小值,并找到了 22 个不同的局部解。要查看局部解的范围,请输入 histogram([manymins.Fval],10)。
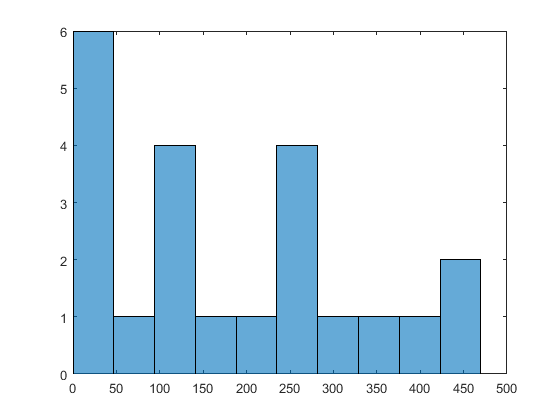
与在 使用更多起点 中发现的极小值相比,本次运行发现了更好(更小)的极小值,并且成功运行的百分比更高。