corner
(不推荐)查找图像中的角点
不建议使用 corner。请改用 Computer Vision Toolbox™ 中的 detectHarrisFeatures (Computer Vision Toolbox) 或 detectMinEigenFeatures (Computer Vision Toolbox)。
说明
示例
此示例说明如何使用 corner 函数定位角点,并通过细化所需角点的最大数量来调整结果。
创建一个棋盘图像。
I = checkerboard(40,2,2);
查找图像中的角点。
C = corner(I);
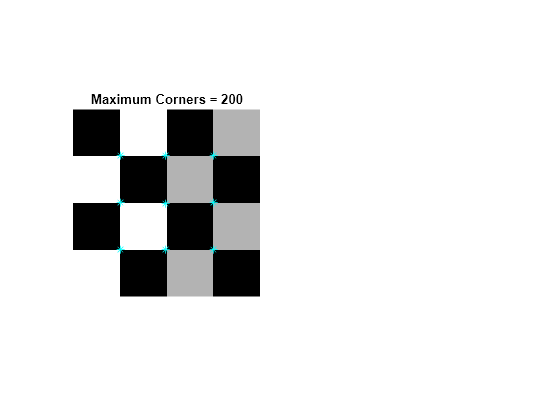
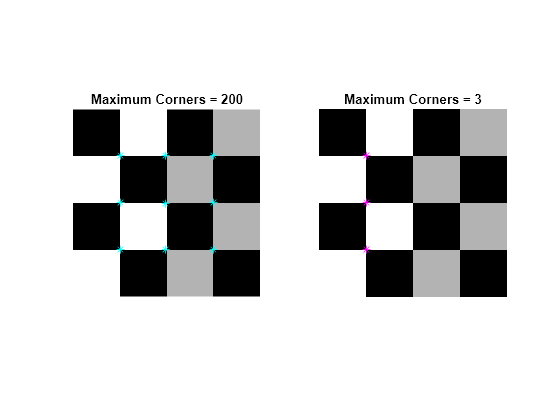
当最大角点数设置为默认值 200 时,所显示的角点。
subplot(1,2,1); imshow(I); hold on plot(C(:,1), C(:,2), '*', 'Color', 'c') title('Maximum Corners = 200') hold off
当最大角点数设置为 3 时,所显示的角点。
corners_max_specified = corner(I,3); subplot(1,2,2); imshow(I); hold on plot(corners_max_specified(:,1), corners_max_specified(:,2), ... '*', 'Color', 'm') title('Maximum Corners = 3') hold off
输入参数
名称-值参数
输出参量
提示
corner 和 cornermetric 函数都可用于检测图像中的角点。对于大多数应用,使用简化的 corner 函数只需一步即可找到角点。如果您要更好地控制角点选择,请使用 cornermetric 函数计算角点度量矩阵,然后编写自己的算法来查找峰值。
算法
corner 函数对候选角点执行非最大值隐藏,角点至少相隔两个像素。
版本历史记录
在 R2010b 中推出
另请参阅
cornermetric | detectHarrisFeatures (Computer Vision Toolbox) | detectMinEigenFeatures (Computer Vision Toolbox)