cornermetric
(Not recommended) Create corner metric matrix from image
cornermetric is not recommended. Use detectHarrisFeatures (Computer Vision Toolbox) or detectMinEigenFeatures (Computer Vision Toolbox) and the cornerPoints (Computer Vision Toolbox) object in Computer Vision Toolbox™ instead. For more information, see Version History.
Description
C = cornermetric(___,Name=Value)
Examples
Read an input image into the workspace.
I = imread("circles.png");Generate a corner metric matrix. Specify the filter coefficients. The corner detection method takes the default value "Harris".
filter = [0.25 0.5 0.25]; C = cornermetric(I,FilterCoefficients=filter);
Use imregionalmax to detect corner features (pixels) from the corner metric matrix.
corner_peaks = imregionalmax(C);
Set the value of the detected corner pixels to [255 0 0].
corner_idx = find(corner_peaks == true); [r,g,b] = deal(I); r(corner_idx) = 255; g(corner_idx) = 0; b(corner_idx) = 0; RGB = cat(3,r,g,b);
Adjust the corner metric matrix for viewing.
C_adjusted = imadjust(C);
Display the original image, adjusted corner metric and the detected corner features as a montage. The detected corner features are displayed as red color pixels with RGB value as [255 0 0].
montage({I,C_adjusted,RGB},Size=[1 3])
title("Original Image vs. Adjusted Corner Metric Matrix vs. Detected Corner Features");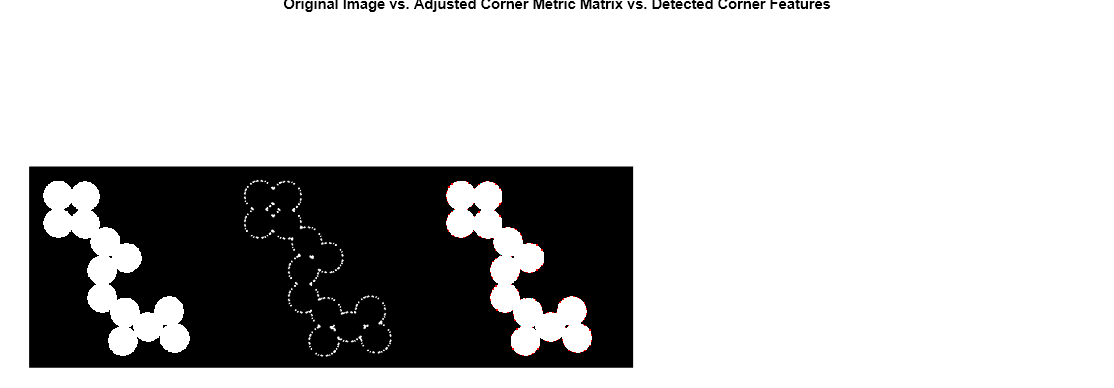
Read an input image into the workspace.
I = imread("bag.png");Generate a corner metric matrix. Specify the method as "MinimumEigenvalue".
C = cornermetric(I,"MinimumEigenvalue");Use imregionalmax to detect corner features (pixels) from the corner metric matrix.
corner_peaks = imregionalmax(C);
Set the value of the detected corner pixels to [255 0 0].
RGB = labeloverlay(I,corner_peaks,Transparency=0,Colormap=[1 0 0]);
Adjust the corner metric matrix for viewing.
C_adjusted = imadjust(C);
Display the original image, adjusted corner metric and the detected corner features as a montage. The detected corner features are displayed as red color pixels.
montage({I,C_adjusted,RGB},Size=[1 3],BorderSize=5,BackgroundColor="w")
title("Original Image vs. Adjusted Corner Metric Matrix vs. Detected Corner Features");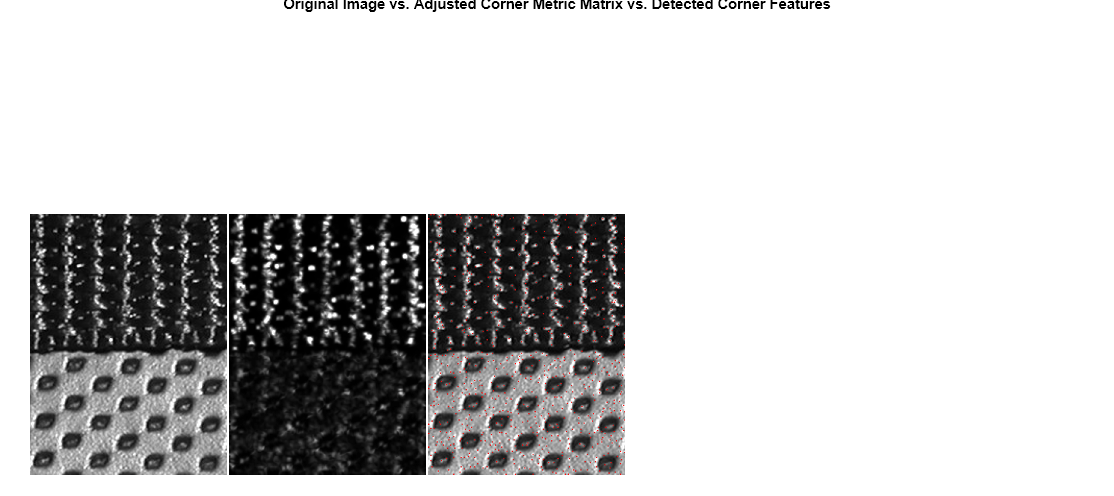
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The corner and cornermetric functions both detect
corners in images. For most applications, use the streamlined corner
function to find corners in one step. If you want greater control over corner selection, use
the cornermetric function to compute a corner metric matrix. Then, write
your own algorithm to find peak values in corner metric matrix.