edge
查找二维灰度图像中的边缘
语法
说明
示例
将灰度图像读入工作区并显示它。
I = imread('circuit.tif');
imshow(I)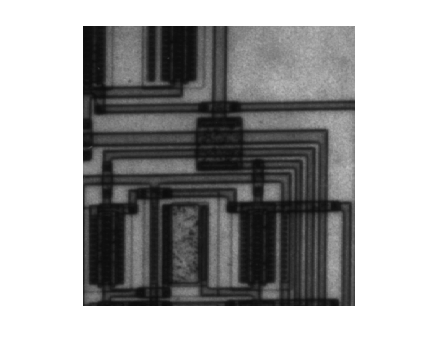
使用坎尼方法查找边缘。
BW1 = edge(I,'Canny');使用普瑞维特方法查找边缘。
BW2 = edge(I,'Prewitt');将两个结果并排显示。
imshowpair(BW1,BW2,'montage')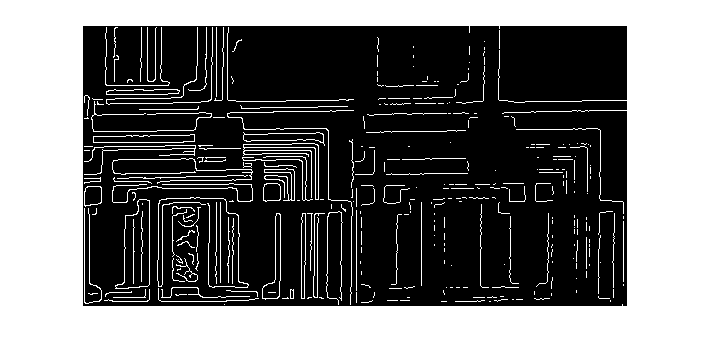
输入参数
输出参量
参考
[1] Canny, John, "A Computational Approach to Edge Detection," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. PAMI-8, No. 6, 1986, pp. 679-698.
[2] Lim, Jae S., Two-Dimensional Signal and Image Processing, Englewood Cliffs, NJ, Prentice Hall, 1990, pp. 478-488.
[3] Parker, James R., Algorithms for Image Processing and Computer Vision, New York, John Wiley & Sons, Inc., 1997, pp. 23-29.
扩展功能
版本历史记录
在 R2006a 之前推出另请参阅
edge3 | fspecial | imgradient | imgradientxy