deconvwnr
使用 Wiener 滤波对图像进行去模糊处理
说明
示例
将一个图像读入工作区并显示它。
im = imread("cameraman.tif");
imageshow(im)
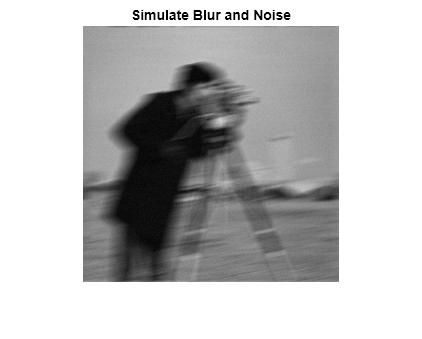
模拟相机移动可能导致的模糊图像。首先,创建点扩散函数 PSF,方法是使用 fspecial 函数并指定以 11 度角跨 21 个像素的线性运动。然后,使用 imfilter 将点扩散函数与图像进行卷积。要减少量化误差,请在调用 imfilter 之前将图像转换为 double。
len = 21; theta = 11; PSF = fspecial("motion",len,theta); im = im2double(im); imBlurred = imfilter(im,PSF,"conv","circular");
向模糊图像添加仿真的高斯噪声。
noise_mean = 0;
noise_var = 0.0001;
imBlurredNoisy = imnoise(imBlurred,"gaussian",noise_mean,noise_var);显示模糊和含噪的图像。
imageshow(imBlurredNoisy)

使用噪信功率比的估计值还原图像。
estimated_nsr = noise_var / var(imBlurredNoisy(:)); wnr3 = deconvwnr(imBlurredNoisy,PSF,estimated_nsr); imageshow(wnr3)
输入参数
输出参量
提示
输出图像
J可能出现算法中使用的离散傅里叶变换引入的振铃效应。要减少振铃效应,请在调用deconvwnr之前使用I = edgetaper(I,psf)。
参考
[1] Gonzalez, R. C., and R. E. Woods. Digital Image Processing. Addison-Wesley Publishing Company, Inc., 1992.
版本历史记录
在 R2006a 之前推出