fanbeam
Fan-beam transform
Description
F = fanbeam(I,D,Name=Value)
[
also returns the location of fan-beam sensors in
F,fanSensorPos,fanRotAngles]
= fanbeam(___)fanSensorPos and the rotation angles
where the fan-beam projections are calculated in
fanRotAngles.
Examples
Set the IPT preference to make the axes visible.
iptsetpref('ImshowAxesVisible','on')
Create a sample image and display it.
ph = phantom(128); imshow(ph)
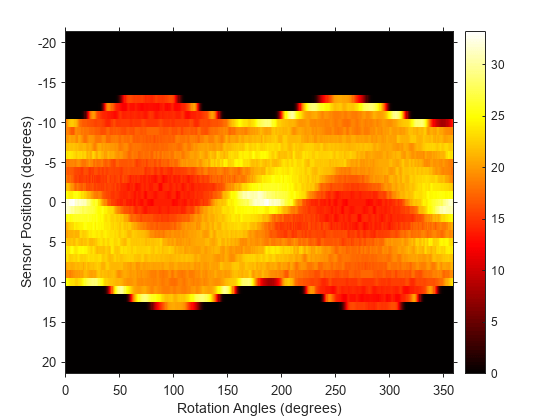
Calculate the fanbeam projections and display them.
[F,Fpos,Fangles] = fanbeam(ph,250); figure imshow(F,[],'XData',Fangles,'YData',Fpos,... 'InitialMagnification','fit') axis normal xlabel('Rotation Angles (degrees)') ylabel('Sensor Positions (degrees)') colormap(gca,hot), colorbar
Compute fan-beam projections for 'arc' geometry.
I = ones(100); D = 200; dtheta = 45; [Farc,FposArcDeg,Fangles] = fanbeam(I,D,... 'FanSensorGeometry','arc',... 'FanRotationIncrement',dtheta);
Convert angular positions to linear distance along x-prime axis.
FposArc = D*tan(FposArcDeg*pi/180);
Compute fan-beam projections for 'line' geometry.
[Fline,FposLine] = fanbeam(I,D,... 'FanSensorGeometry','line',... 'FanRotationIncrement',dtheta);
Compute the corresponding Radon transform.
[R,Rpos]=radon(I,Fangles);
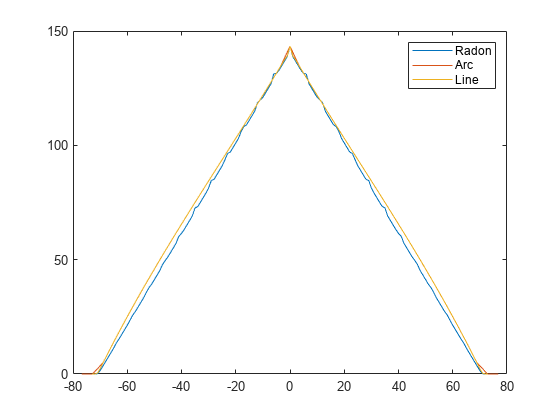
Display the three projections at one particular rotation angle. Note the three are very similar. Differences are due to the geometry of the sampling, and the numerical approximations used in the calculations.
figure idx = find(Fangles==45); plot(Rpos,R(:,idx),... FposArc,Farc(:,idx),... FposLine,Fline(:,idx)) legend('Radon','Arc','Line')
Input Arguments
Input image, specified as a 2-D numeric matrix or 2-D logical matrix.
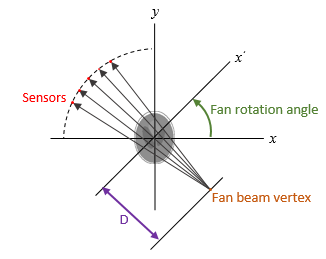
Distance in pixels from the fan beam vertex to the
center of rotation, specified as a positive number.
The center of rotation is the center pixel of the
image, defined as
floor((size(I)+1)/2).
D must be large enough to
ensure that the fan-beam vertex is outside of the
image at all rotation angles. See Tips for guidelines on specifying
D.
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example: fanbeam(I,D,FanRotationIncrement=5)
calculates the fan-beam projection for rotation angles in increments
of 5 degrees.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: fanbeam(I,D,"FanRotationIncrement",5)
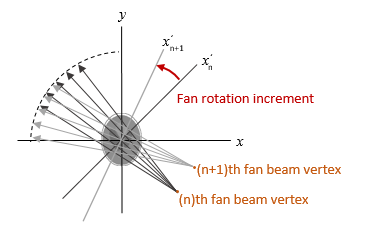
Fan-beam rotation angle increment in degrees, specified as a positive scalar.
Data Types: double
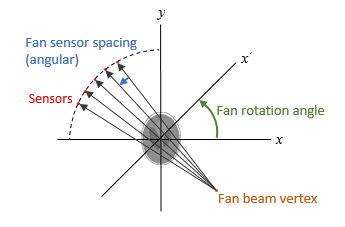
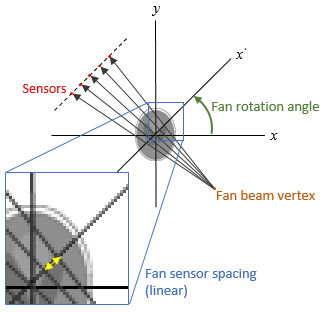
Fan-beam sensor positioning, specified as "arc" or
"line".
Value | Meaning | Diagram |
|---|---|---|
| Sensors are spaced at equal angles along a circular arc. The center of the arc is the fan-beam vertex.
|
|
| Sensors are spaced at equal distances along a line that is
parallel to the x' axis. The closest sensor
is distance
|
|
Output Arguments
Tips
As a guideline, try making D a few pixels larger than
half the image diagonal dimension, calculated as follows.
sqrt(size(I,1)^2 + size(I,2)^2)
The values returned in F are a numerical approximation of
the fan-beam projections. The algorithm depends on the Radon transform,
interpolated to the fan-beam geometry. The results vary depending on the
parameters used. You can expect more accurate results when the image is
larger, D is larger, and for points closer to the
middle of the image, away from the edges.
References
[1] . pp. 92-93.
Version History
Introduced before R2006a