updateMap
Update centroid and point cloud segment locations in map
Description
Examples
Load a map of segments and features from a MAT file into the workspace.
data = load("segmatchMapFullParkingLot.mat");
sMap = data.segmatchMapFullParkingLot;Visualize the map.
figure show(sMap)
Change the viewing angle to top-view.
view(2)
title("Initial Map")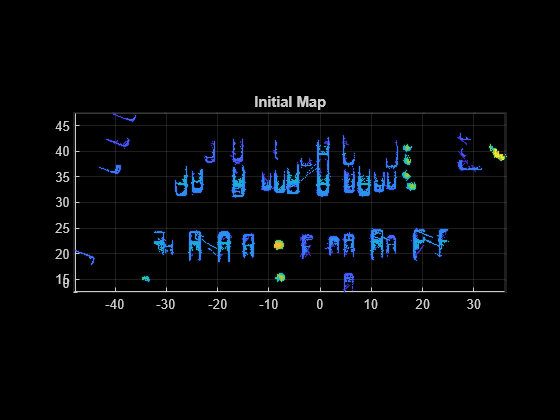
Define the transformation.
eulerAngles = [0 0 45]; % degrees
trans = [100 200 0];
tform = rigidtform3d(eulerAngles,trans);
numViews = numel(sMap.ViewIds);
tforms = repmat(tform,numViews,1);Update the segments and features of each view with the defined transformation.
sMap = updateMap(sMap,tforms);
Visualize the transformed map.
figure show(sMap)
Change the viewing angle to top-view.
view(2)
title("Transformed Map")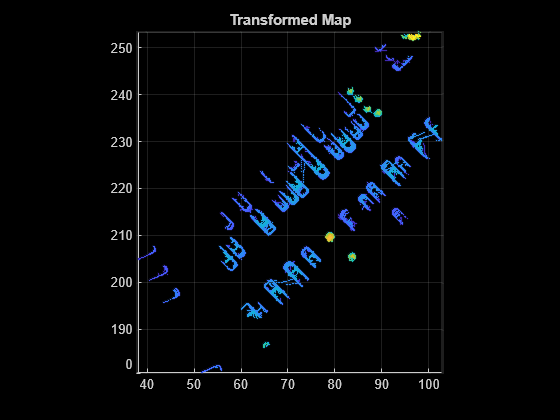
Input Arguments
Output Arguments
Tips
To improve performance, remove all segments from the map using the
deleteSegmentsfunction.