run
Class: lidar.labeler.AutomationAlgorithm
Namespace: lidar.labeler
Description
The run method computes the automated labels for a single frame
by executing the automation algorithm. During automation, the Lidar Labeler app run this method in a loop to compute the automated labels for each
frame in the selection being automated.
Clients of AutomationAlgorithm must implement this
method.
autoLabels = run(algObj,frame)frame, using the
algObj automation algorithm, and returns the automated labels,
autoLabels.
Input Arguments
Output Arguments
Labels produced by the automation algorithm, returned as a categorical matrix, structure array, or table.
For algorithms that automate voxel labeling, implement the run
method to return autoLabels as a categorical label matrix, where each category represents a voxel label.
For algorithms that automate nonvoxel labels, implement the run
method to return a structure array. Each structure in the array contains the labels of a
specific name and type. The method combines labels of the same name and type into a
single structure in the array.
This table describes the columns of the autoLabels table or
fields of each autoLabels structure.
| Field Name | Description | ||||||||
|---|---|---|---|---|---|---|---|---|---|
Type |
| ||||||||
Name | Character vector containing the name of the label. | ||||||||
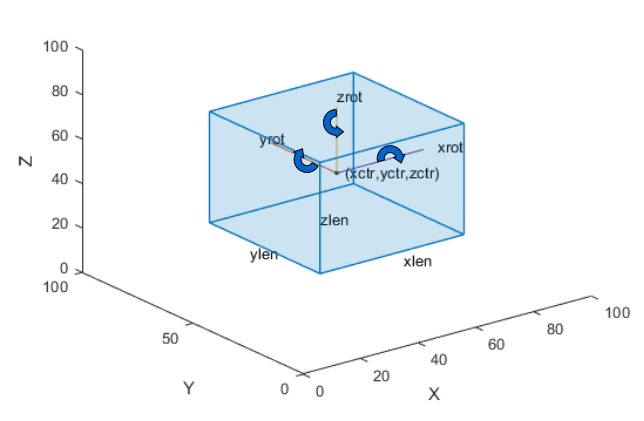
Position | Position of labels of the specified
| ||||||||
Attributes (optional) | Structure array that contains one structure for each attribute in
the label. If the label definition does not contain attributes, then the
For each structure in the |
To view a sample autoLabels structure array, enter this code at
the MATLAB® command
prompt.
autoLabels(1).Name = 'Car'; autoLabels(1).Type = labelType.Cuboid; autoLabels(1).Position = [20 20 5 50 20 10 0 0 0]; autoLabels(2).Name = 'Truck'; autoLabels(2).Type = labelType.Cuboid; autoLabels(2).Position = [70 50 10 70 40 20 0 0 0];
You can also use the run method to return
autoLabels as a table. The table rows are equivalent to the
structures in a structure array. The table columns are equivalent to the structure
fields. This table is equivalent to the sample autoLabels structure
array previously
specified.
Name Type Position
____________ _________ ____________
'Car' Cuboid [1x9 double]
'Truck' Cuboid [1x9 double]Version History
Introduced in R2022a
See Also
lidar.labeler.AutomationAlgorithm | checkSetup | initialize | terminate | labelType | lidarLabelType