segmentObjectsFromEmbeddings
Segment objects in lidar point cloud using Segment Anything Model (SAM) feature embeddings
Since R2024b
Syntax
Description
masks = segmentObjectsFromEmbeddings(lidarSAM,embeddings,ptCloud,ForegroundPoints=pointPrompt)ptCloud using the SAM
feature embeddings embeddings and the foreground point coordinates
pointPrompt as a visual prompt.
[
returns the scores masks,scores,maskLogits] = segmentObjectsFromEmbeddings(___)scores corresponding to each predicted object mask
and the prediction mask logits maskLogits, using any combination of
input arguments from previous syntaxes.
[___] = segmentObjectsFromEmbeddings(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)ReturnMultiMask=true
specifies to return multiple masks for a segmented object.
Note
This functionality requires Deep Learning Toolbox™ and the Image Processing Toolbox™ Model for Segment Anything Model support package. You can download and install the Image Processing Toolbox Model for Segment Anything Model from Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons.
Examples
Specify a full file path for a LAS file that contains aerial lidar data. Then, read the point cloud data from the file using the readPointCloud function of the lasFileReader object.
filename = fullfile(matlabroot,"toolbox","lidar", ... "lidardata","las","aerialLidarData2.las"); lasReader = lasFileReader(filename); ptCloud = readPointCloud(lasReader);
Remove the ground plane from the point cloud to get better segmentation results. Display the resulting point cloud.
[~,nonGroundPtCloud] = segmentGroundSMRF(ptCloud); figure pcshow(nonGroundPtCloud)
Create a Segment Anything Model object for aerial lidar point cloud segmentation.
samLidar = segmentAnythingAerialLidar;
Extract the feature embeddings from the point cloud.
embeddings = extractEmbeddings(samLidar,nonGroundPtCloud);
Specify a bounding box that contains an object to segment, and display it in green.
boxPrompt = [429321 3680081 79.89 14 7 3 0 0 0]; showShape("cuboid",boxPrompt,Color="green")
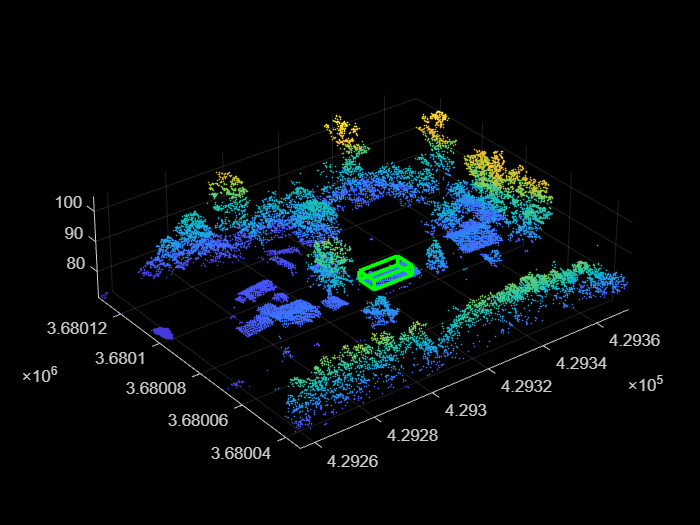
Segment the object using the segmentObjectsFromEmbeddings function, which runs the SAM decoder on the feature embeddings.
mask = segmentObjectsFromEmbeddings(samLidar, ...
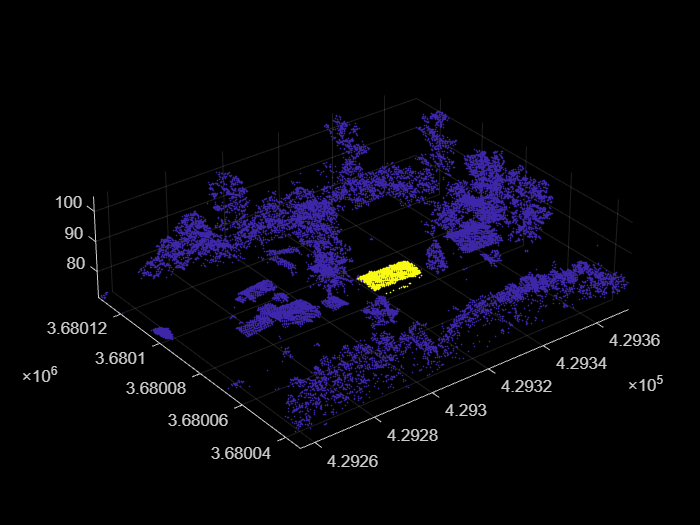
embeddings,nonGroundPtCloud,BoundingBox=boxPrompt);Visualize the segmentation mask overlaid on the point cloud.
figure pcshow(nonGroundPtCloud.Location,single(mask))
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2024b