Use Custom Point Cloud Source Reader for Labeling
The Lidar Labeler app enables you to label ground truth data in point clouds. You can use a custom reader to import the data. First, create a custom reader function. Then, load the custom reader function and corresponding point cloud data source into the Lidar Labeler.
Create Custom Reader Function
Specify a custom reader as a function handle. The custom reader must have this syntax.
outputPointCloud = readerFcn(sourceName,currentTimestamp)
readerFcn is the name of the custom reader
function.The custom reader function loads a point cloud from sourceName,
which corresponds to the current timestamp specified by
currentTimestamp. For example, suppose you want to load the
point cloud at the third timestamp for a timestamp duration vector
that runs from 1 to 5 seconds. To specify currentTimestamp, at the
MATLAB® command prompt, enter this
code.
timestamps = seconds(1:5); currIdx = 3; currentTimestamp = timestamps(currIdx);
outputPointCloud from the custom reader function must be a pointCloud object.currentTimestamp is a scalar value
that corresponds to the current frame that the function is executing.
Import Data Source into Lidar Labeler App
To import a custom data source into the app, first create a structure. This structure stores the function handle and timestamps. Specify the custom reader function handle that reads the data, and the timestamps.
sourceParams = struct(); sourceParams.FunctionHandle = readerFcn; sourceParams.Timestamps = timestamps;
To load this structure into the app, at the MATLAB command prompt, enter this code.
lidarLabeler(sourceName,@sourceParams.FunctionHandle,sourceParams.Timestamps);
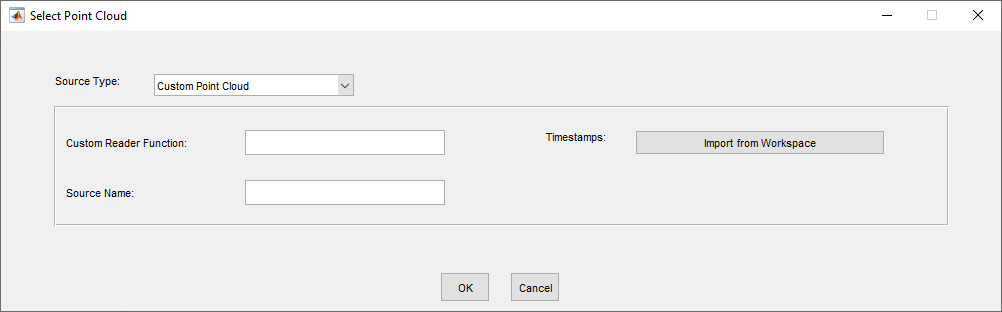
Alternatively, on the toolstrip of the Lidar Labeler app, select
Import > Add Point Cloud.
Then, in the Select Point Cloud dialog box, choose Custom Point
Cloud as the Source Type. Specify
Custom Reader Function as the function handle and also specify
Source Name. In addition, you must import corresponding
timestamps from the MATLAB workspace.