pointLocation
包含点的三角形或四面体
语法
说明
示例
查找三角剖分中包围一组查询点的三角形。
定义三角剖分的点和连接。
TP = [2.5 8.0;
6.5 8.0;
2.5 5.0;
6.5 5.0;
1.0 6.5;
8.0 6.5];
C = [5 3 1;
3 2 1;
3 4 2;
4 6 2];
TR = triangulation(C,TP);定义两个查询点。
P = [2.25 7; 6 6.5];
绘图三角剖分和查询点。
triplot(TR) hold on plot(P(:,1),P(:,2),"k*") ylim([4 9]) xlim([0 9])

确定包围每个查询点的三角形的 ID。
ID = pointLocation(TR,P)
ID = 2×1
1
3
用红色突出显示包围查询点的三角形。
triplot(TR.ConnectivityList(ID,:),TP(:,1),TP(:,2),"r")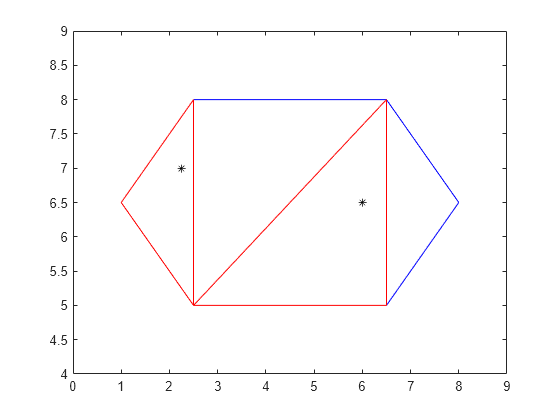
查找三维三角剖分中包围一组查询点的四面体。
基于一组三维点创建德劳内三角剖分。
rng default
x = rand([20 1]);
y = rand([20 1]);
z = rand([20 1]);
TR = delaunayTriangulation(x,y,z);查找包围查询点的四面体的 ID 并计算查询点的重心坐标。
P = [0.7 0.6 0.3;
0.5 0.5 0.5];
[ID,B] = pointLocation(TR,P)ID = 2×1
9
8
B = 2×4
0.2046 0.0893 0.5721 0.1340
0.1900 0.1495 0.6422 0.0183
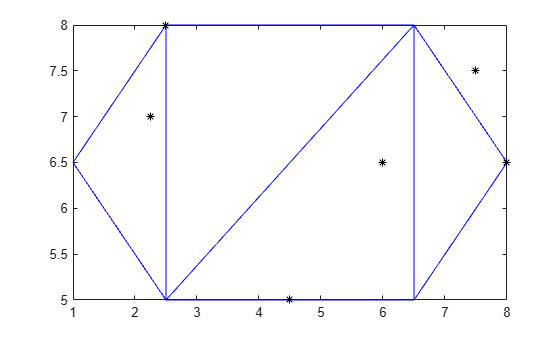
确定哪些查询点位于二维三角剖分的三角形的边和顶点上。
定义三角剖分的点和连接。
TP = [2.5 8.0;
6.5 8.0;
2.5 5.0;
6.5 5.0;
1.0 6.5;
8.0 6.5];
C = [5 3 1;
3 2 1;
3 4 2;
4 6 2];
TR = triangulation(C,TP);定义查询点。
P = [2.25 7;
6 6.5;
2.5 8.0;
4.5 5.0;
8 6.5
7.5 7.5];查找每个查询点相对于包含该点的三角形的重心坐标。对于三角剖分外部的点,pointLocation 返回 NaN。
[~,B] = pointLocation(TR,P)
B = 6×3
0.1667 0.2500 0.5833
0.1250 0.3750 0.5000
0 0 1.0000
0.5000 0.5000 0.0000
0 1.0000 0
NaN NaN NaN
使用重心坐标确定查询点是位于顶点上、边上、三角形内还是三角剖分外。如果查询点位于顶点上,则其重心坐标之一为 1,其他坐标为 0。如果查询点位于边上但不与顶点重合,则其重心坐标之一为 0,其他坐标均不为 1。对于三角剖分外的查询点,重心坐标为 NaN。
M = size(B,1); loc = cell(M,2); tol = 1e-10; for i = 1:M b = B(i,:); loc{i,1} = P(i,1:2); if ismembertol(1,b,tol) loc{i,2} = "Vertex"; elseif ismembertol(0,b,tol) loc{i,2} = "Edge"; elseif isnan(B(i)) loc{i,2} = "Outside"; else loc{i,2} = "Triangle"; end end loc
loc=6×2 cell array
{[ 2.2500 7]} {["Triangle"]}
{[ 6 6.5000]} {["Triangle"]}
{[ 2.5000 8]} {["Vertex" ]}
{[ 4.5000 5]} {["Edge" ]}
{[ 8 6.5000]} {["Vertex" ]}
{[7.5000 7.5000]} {["Outside" ]}
绘图三角剖分和查询点。
triplot(TR) hold on plot(P(:,1),P(:,2),'k*')