mcb.getMotorControlAnalysis
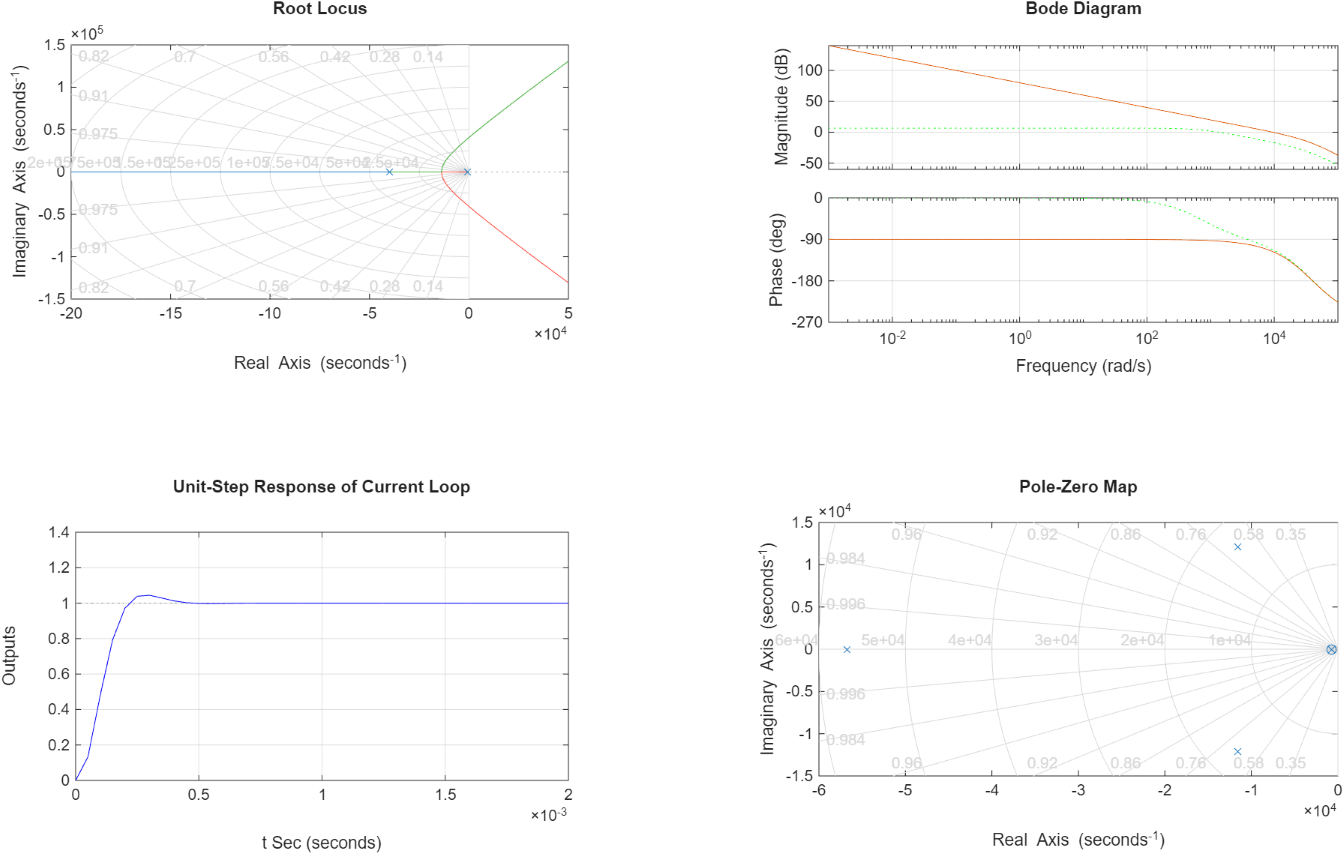
Frequency-domain analysis plots for PI controller of field-oriented control
Description
mcb.getMotorControlAnalysis(
generates frequency-domain analysis plots for PI controllers used in field-oriented control
of a permanent magnet synchronous motor (PMSM).pmsm,inverter,PU_System,PI_params,Ts,Ts_speed)
The function plots the root locus curves, Bode diagram, current loop unit-step response, and pole-zero map for the system with the provided PI gains.
This function requires Control System Toolbox™.
Examples
Set the pulse-width modulation (PWM) switching frequency and sample times for your motor control system.
PWM_frequency = 20e3; T_pwm = 1/PWM_frequency; Ts = T_pwm; Ts_speed = 10*Ts;
Get parameters for your motor and inverter. This example uses a BLY171D PMSM and DRV8312-C2-KIT inverter.
pmsm = mcb.getPMSMParameters("BLY171D"); inverter = mcb.getInverterParameters("DRV8312-C2-KIT");
Get the per-unit base values for the PMSM and inverter.
PU_System = mcb.getPUSystemParameters(pmsm,inverter);
Get the PI controller gains for the PMSM in per-unit system.
PI_params = mcb.calcFOCGains(pmsm,Ts,Ts_speed,Base=PU_System);
Plot results of frequency domain analysis for the PMSM.
mcb.getMotorControlAnalysis(pmsm,inverter,PU_System,PI_params,Ts,Ts_speed)