mcb.PMSMCharacteristics
Syntax
Description
characteristics = mcb.PMSMCharacteristics(pmsm,inverter)pmsm and inverter with
parameters inverter.
characteristics = mcb.PMSMCharacteristics(pmsm,inverter,Name=Value)driveCharacteristics to 1.
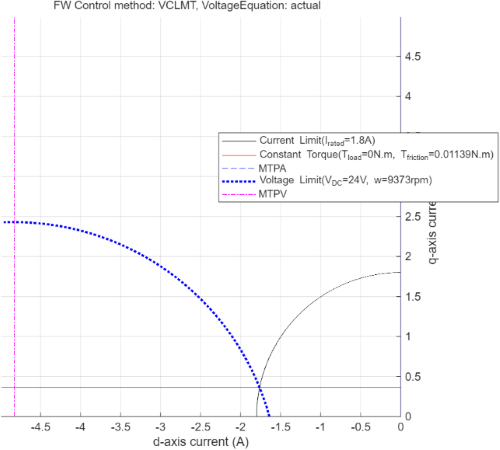
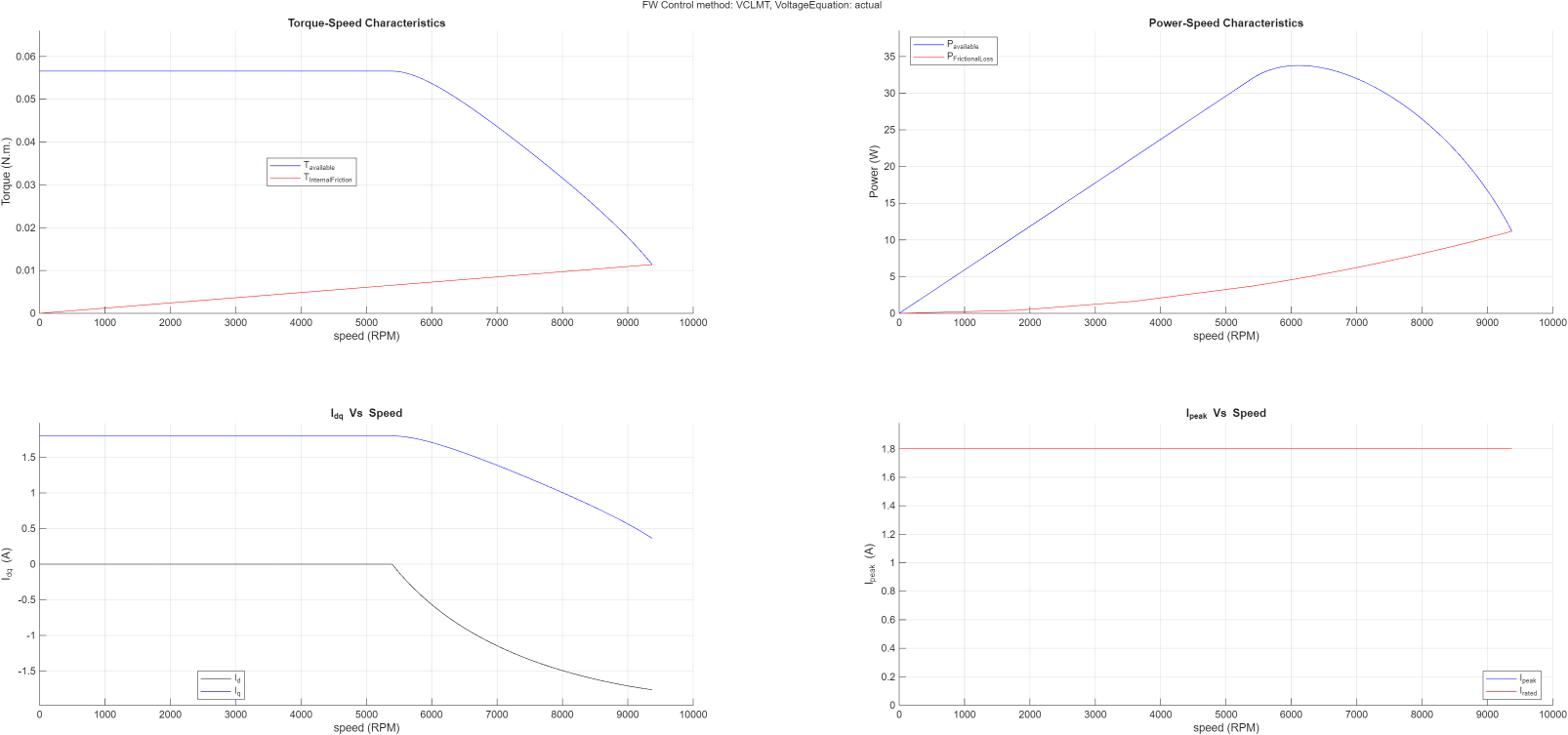
The function plots the current limit curve, constant torque curve, MTPA curve, voltage limit curve, and MTPV curve in current and voltage space. When enabled, the function also plots torque-speed, power-speed, current-speed, and peak current-speed drive characteristics. For details, see PMSM Constraint Curves and Their Application and PMSM Drive Characteristics and Constraint Curves.
Examples
Get parameters for your motor and inverter. This example uses a BLY171D PMSM and DRV8312-C2-KIT inverter.
pmsm = mcb.getPMSMParameters("BLY171D"); inverter = mcb.getInverterParameters("DRV8312-C2-KIT");
Plot constraint curves and characteristic curves and assign the data to a variable.
characteristics = mcb.PMSMCharacteristics(pmsm,inverter,driveCharacteristics=1)
characteristics =
struct with fields:
current: [1×1 struct]
torque: [1×1 struct]
mtpa: [1×1 struct]
voltage: [1×1 struct]
mtpv: [1×1 struct]
idArray: [0 0 0 0 -0.0739 -0.1455 -0.2126 -0.2767 -0.3388 -0.3974 -0.4534 -0.5079 -0.5594 -0.6089 -0.6571 -0.7028 -0.7467 -0.7896 … ] (1×64 double)
iqArray: [1.8000 1.8000 1.8000 1.8000 1.7985 1.7941 1.7874 1.7786 1.7678 1.7556 1.7420 1.7268 1.7109 1.6939 1.6758 1.6571 1.6378 1.6176 … ] (1×64 double)
vdArray: [-7.9168e-04 -1.4234 -2.8469 -4.2695 -4.3736 -4.4696 -4.5555 -4.6336 -4.7055 -4.7695 -4.8274 -4.8803 -4.9269 -4.9684 -5.0057 … ] (1×64 double)
vqArray: [1.3522 5.2947 9.2394 13.1819 13.1481 13.1157 13.0861 13.0587 13.0330 13.0097 12.9883 12.9685 12.9509 12.9350 12.9206 12.9081 … ] (1×64 double)
wArray: [1 1798 3596 5393 5459 5526 5592 5658 5725 5791 5857 5924 5990 6056 6123 6189 6255 6322 6388 6454 6521 6587 6653 6720 6786 … ] (1×64 double)
TArray: [0.0566 0.0566 0.0566 0.0566 0.0565 0.0564 0.0562 0.0559 0.0556 0.0552 0.0547 0.0543 0.0538 0.0532 0.0527 0.0521 0.0515 0.0508 … ] (1×64 double)
PArray: [0.0059 10.6507 21.3013 31.9460 32.3097 32.6268 32.8930 33.1175 33.3065 33.4574 33.5758 33.6653 33.7251 33.7585 33.7670 … ] (1×64 double)
pmsm: [1×1 struct]
inverter: [1×1 struct]
FWCMethod: 'vclmt'
voltageEquation: 'actual'
speed_milestone: [2×1 double]
id_milestone: [0 -1.7631]
iq_milestone: [1.8000 0.3624]