传感器校准和位置感测
计算霍尔传感器、正交编码器和 ADC 的霍尔序列和偏移量,以精确计算位置和电流反馈值。
模块
| Hall Speed and Position | 使用霍尔传感器计算转子转速和估计转子位置 |
| Hall Validity | 计算转子旋转方向和霍尔传感器序列有效性 |
| Quadrature Decoder | 计算正交编码器的位置 |
| Resolver Decoder | 计算电机机械位置和转速以及电机电气位置的正弦和余弦值 |
| Mechanical to Electrical Position | 根据转子的机械位置计算其电气位置 |
| Speed Measurement | 根据转子的角位置计算转速 |
主题
- ADC Offset Calibration in FOC
Calibrate for ADC Offset in FOC.
- Position Sensor Offset Calibration for Quadrature Encoder and Hall Sensor
Calibrate for sensor-based control using blocks available in Motor Control Blockset.
- How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
精选示例
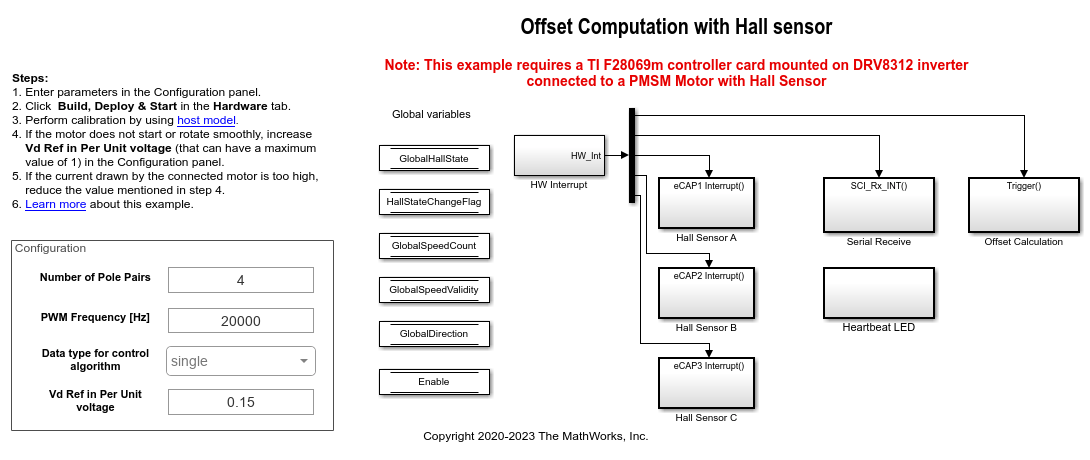
PMSM 的霍尔偏移量校准
此示例计算转子直轴(d 轴)和霍尔传感器检测到的位置之间的偏移量。磁场定向控制 (FOC) 算法需要此位置偏移量来正确运行永磁同步电机 (PMSM)。为了计算偏移量,目标模型在开环条件下运行电机。该模型使用常量 (沿定子
d 轴的电压)和零值 (沿定子
q 轴的电压),通过使用位置或斜坡发生器来运行电机(以低恒定转速)。当位置或斜坡值达到零时,对应的转子位置就是霍尔传感器的偏移值。
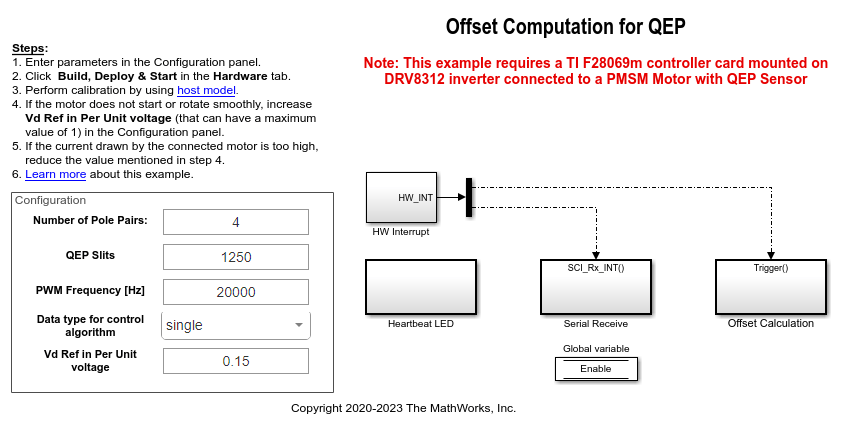
PMSM 的正交编码器偏移量校准
此示例计算转子的 d 轴与正交编码器检测到的编码器索引脉冲位置之间的偏移量。控制算法(在磁场定向控制和参数估计示例中可用)使用此偏移值来计算转子的 d 轴的精确位置。控制器需要此位置以在转子磁通参考系(d-q 参考系)中正确实现磁场定向控制 (FOC),从而正确运行永磁同步电机 (PMSM)。

以开环控制方式运行三相 AC 电机并校准 ADC 偏移量
此示例使用开环控制(也称为标量控制或伏特/赫兹控制)来运行电机。这种方法会改变定子电压和频率来控制转子转速,而不使用来自电机的任何反馈。您可以使用这种方法来检查硬件连接的完整性。开环控制的恒速应用使用固定频率的电机电源。开环控制的可调速应用需要可变频率电源来控制转子转速。为了确保恒定的定子磁通,请保持电源电压振幅与其频率成比例。

BLDC 电机的霍尔传感器序列校准
此示例计算开环控制中相对于转子零位置的霍尔传感器序列。此工作流帮助您使用六步换相的方式旋转电机,而无需标记霍尔传感器或推断开关序列。运行此示例并获取霍尔序列,使用此霍尔序列和 Six Step Commutation 模块按照使用传感器反馈对 BLDC 电机进行六步换相示例中的说明以闭环形式运行电机。
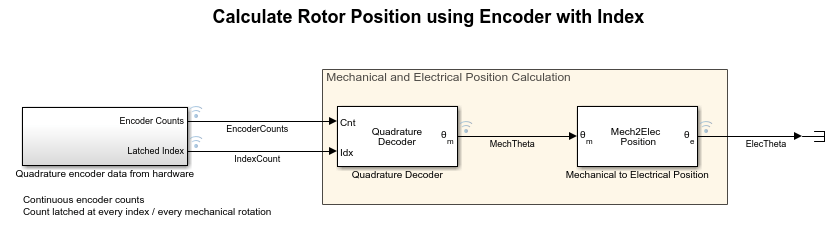
Simulate Calculation of Rotor Position Using Quadrature Decoder Block
Use the quadrature decoder block to simulate estimation of rotor position.
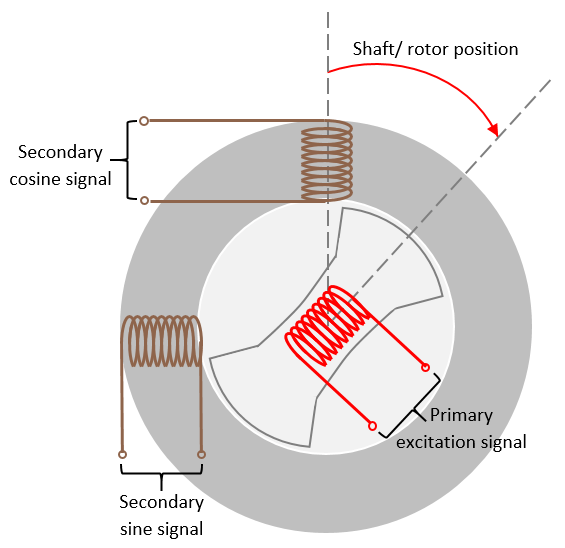
Monitor Resolver Using Serial Communication
Use the resolver sensor to measure the rotor position. The resolver consists of two stator (secondary) windings placed orthogonally around the resolver rotor (primary) winding. After you mount the resolver sensor over a PMSM, the resolver rotor winding rotates with the shaft of the running motor. Meanwhile, the controller provides a fixed-frequency excitation signal (alternating sinusoidal or square pulse) to the primary winding.