Speedgoat Performance
浏览支持在 Speedgoat® Performance 硬件上进行部署的电机控制应用
浏览可以在具有 IO-334 的 Speedgoat Performance 实时目标机上进行部署的 Motor Control Blockset™ 示例。
精选示例
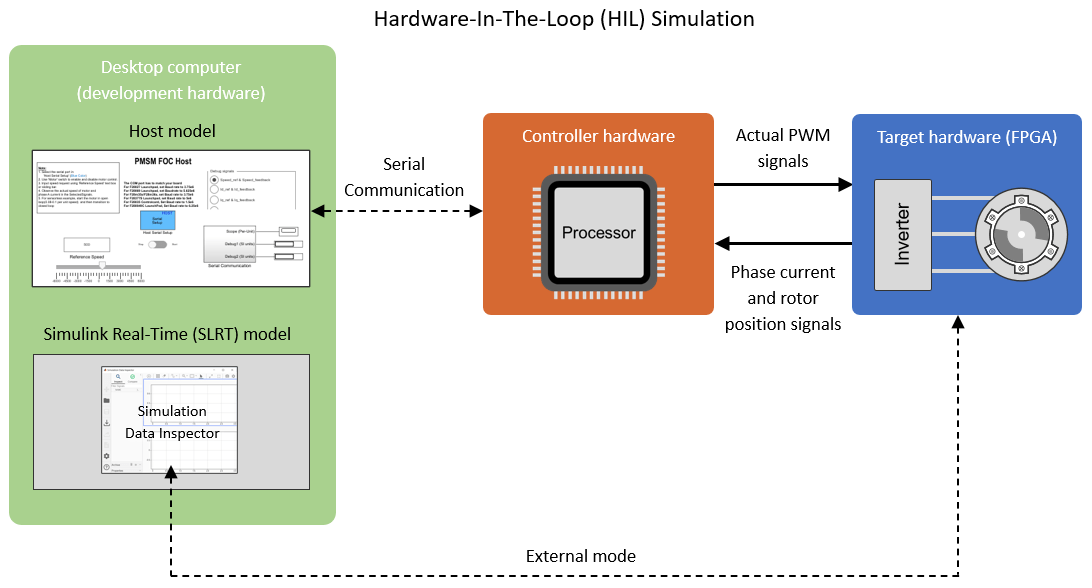
Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see 磁场定向控制.