collisionCapsule
Description
The collisionCapsule object is a capsule primitive collision geometry
defined by a radius and length, with the central line segment of the capsule aligning with its
z-axis and the origin of the body-fixed frame located at the midpoint of
the central line segment.
Creation
Description
CAPS = collisionCapsule(
creates a capsule primitive with the specified radius radius,length)radius and
length length. The radius and
length arguments set the Radius and
Length properties, respectively.
CAPS = collisionCapsule(___,Pose=
sets the pose)Pose property of the capsule to pose,
relative to the world frame.
Properties
Object Functions
checkCollision | Check if two geometries are in collision |
genspheres | Generate spheres along central line segment of capsule |
convertToCollisionMesh | Convert collision primitive geometry into collision mesh geometry |
show | Show collision geometry |
Examples
Create a capsule collision geometry centered at the origin. The radius and length are 1 and 2 meters, respectively.
cap = collisionCapsule(1,2)
cap =
collisionCapsule with properties:
Radius: 1
Length: 2
Pose: [4×4 double]
Visualize the capsule.
show(cap);
title("Collision Capsule")
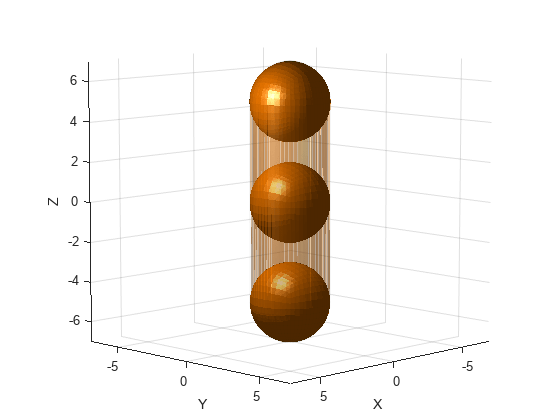
Create a collision capsule with a radius of 2 and length of 10. Visualize the capsule.
cCapsule = collisionCapsule(2,10); [~,p] = show(cCapsule);
Generate spheres at ratios 0.0, 0.5, and 1.0 of the capsule length.
spheres = genspheres(cCapsule,linspace(0,1,3));
Display the positions of the spheres.
for i = 1:length(spheres) disp(tform2trvec(spheres{i}.Pose)) end
0 0 -5
0 0 0
0 0 5
Set the face and edge alphas of the capsule to low values. This ensures that both the spheres are visible when you add them to the figure.
p.FaceAlpha = 0.4;
p.EdgeAlpha = 0.01;
hold onDisplay the generated spheres on the capsule.
cellfun(@show,spheres);
Extended Capabilities
Version History
Introduced in R2022bSee Also
Objects
Functions
checkCollision|fitCollisionCapsule|showCollisionArray(Robotics System Toolbox)