transformScan
Transform laser scan based on relative pose
Syntax
Description
[
transforms the laser scan specified in transRanges,transAngles]
= transformScan(ranges,angles,relPose)ranges and
angles by using the specified relative pose,
relPose.
Examples
Create a lidarScan object. Specify the ranges and angles as vectors.
refRanges = 5*ones(1,300); refAngles = linspace(-pi/2,pi/2,300); refScan = lidarScan(refRanges,refAngles);
Translate the laser scan by an [x y] offset of (0.5,0.2).
transformedScan = transformScan(refScan,[0.5 0.2 0]);
Rotate the laser scan by 20 degrees.
rotateScan = transformScan(refScan,[0,0,deg2rad(20)]);
Use the matchScans function to find the relative transformation between two lidar scans. Then, transform the second scan into the coordinate frame of the first scan.
Load a pair of lidar scans as a pair of lidarScan objects. They are two scans of the same scene with a change in relative pose.
load tb3_scanPair.mat plot(s1) hold on plot(s2) hold off

The relative pose is estimated from an odometry sensor and provided as a variable, initGuess, as [x y theta].
disp(initGuess)
-0.7000 0.1500 -0.3254
Use scan matching to find the relative pose between the two laser scans and specify the initial guess for the pose.
pose = matchScans(s2,s1,"InitialPose",initGuess);
disp(pose)-0.7213 0.1160 -0.2854
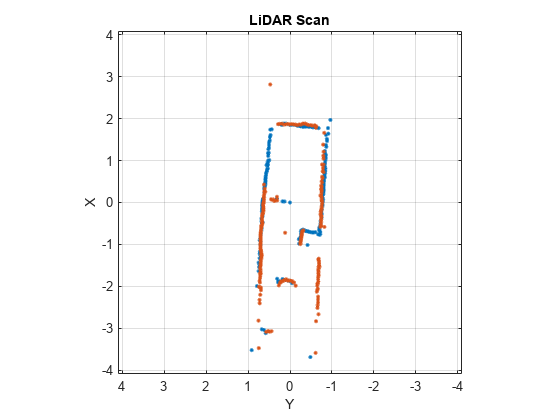
Transform the second scan to the coordinate frame of the first scan. Plot the two scans to see that they now overlap.
s2Transformed = transformScan(s2,pose); plot(s1) hold on plot(s2Transformed) hold off
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2017a