updatePose
Description
isUpdated = updatePose(mTSDF,poseStruct)
Examples
Create two collision boxes and one collision sphere. The collision boxes represent a static environment and the sphere represents a dynamic obstacle with a pose that could change at any time.
box1 = collisionBox(0.5,1,0.1);
box2 = collisionBox(0.5,0.1,0.2,Pose=trvec2tform([0 -0.45 0.15]));
sph = collisionSphere(0.125,Pose=trvec2tform([-0.1 0.25 0.75]));
showCollisionArray({box1,box2,sph});
title("Static Environment and Dynamic Obstacle")
v = [110 10];
view(v);
Create a mesh TSDF manager with a resolution of 25 cells per meter.
tsdfs = meshtsdf(Resolution=25);
To improve the efficiency of signed distance field computation, combine meshes that represent the static environment.
staticMeshes = geom2struct({box1,box2});
staticEnv = staticMeshes(1);
staticEnv.Pose = eye(4);
staticEnv.Vertices = [];
staticEnv.Faces = [];
for i = 1:numel(staticMeshes)
H = staticMeshes(i).Pose;
V = staticMeshes(i).Vertices*H(1:3,1:3)'+ H(1:3,end)';
nVert = size(staticEnv.Vertices,1);
staticEnv.Vertices = [staticEnv.Vertices; V];
staticEnv.Faces = [staticEnv.Faces; staticMeshes(i).Faces+nVert];
end
staticEnv.ID = 1;Add the static environment mesh to the TSDF manager.
addMesh(tsdfs,staticEnv);
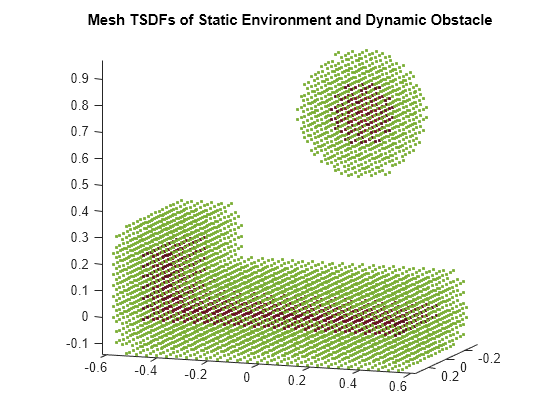
Convert the sphere collision geometry into a structure for the mesh TSDF manager. Assign it an ID of 2 and add it to the mesh TSDF manager.
obstacleID = 2; dynamicObstacle = geom2struct(sph,obstacleID); addMesh(tsdfs,dynamicObstacle); show(tsdfs) view(v) axis equal title("Mesh TSDFs of Static Environment and Dynamic Obstacle")
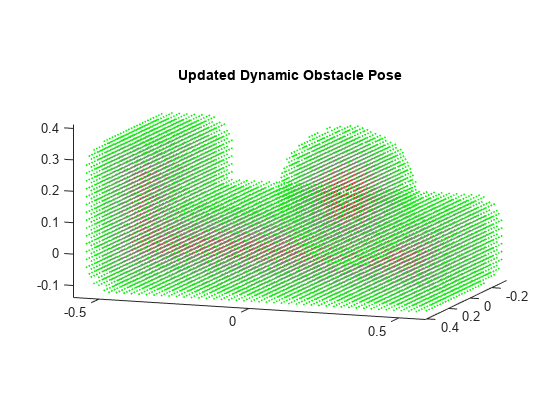
Update the pose of the dynamic obstacle in the mesh TSDF manager by changing Pose property of the object handle of the obstacle. Then use the updatePose function to update the pose of the mesh in the TSDF manager.
dynamicObstacle.Pose = trvec2tform([0.2 0.25 0.2]); updatePose(tsdfs,dynamicObstacle)
ans = 1
show(tsdfs) view(v) axis equal title("Updated Dynamic Obstacle Pose")
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2024a