mobileRobotPropagator
Description
The mobileRobotPropagator object is a state propagator that propagates
and validates the state of a mobile robot based on control commands, durations, and target
states. The object supports different kinematic models, integrator types, and control
policies.
Creation
Description
mobileProp = mobileRobotPropagator
mobileProp = mobileRobotPropagator(Name,Value)mobileRobotPropagator("ControlStepSize"=0.01) creates a mobile
robot propagator with a control step size of 0.01.
Properties
Object Functions
distance | Estimate cost of propagating to target state |
propagate | Propagate system without validation |
propagateWhileValid | Propagate system and return valid motion |
sampleControl | Generate control command and duration |
setup | Set up the mobile robot state propagator |
Examples
Plan control paths for a bicycle kinematic model with the mobileRobotPropagator object. Specify a map for the environment, set state bounds, and define a start and goal location. Plan a path using the control-based RRT algorithm, which uses a state propagator for planning motion and the required control commands.
Set State and State Propagator Parameters
Load a ternary map matrix and create an occupancyMap object. Create the state propagator using the map. By default, the state propagator uses a bicycle kinematic model.
load('exampleMaps','ternaryMap') map = occupancyMap(ternaryMap,10); propagator = mobileRobotPropagator(Environment=map); % Bicycle model
Set the state bounds on the state space based on the map world limits.
propagator.StateSpace.StateBounds(1:2,:) = ...
[map.XWorldLimits; map.YWorldLimits];Plan Path
Create the path planner from the state propagator.
planner = plannerControlRRT(propagator);
Specify the start and goal states.
start = [10 15 0]; goal = [40 30 0];
Plan a path between the states. For repeatable results, reset the random number generator before planning. The plan function outputs a navPathControl object, which contains the states, control commands, and durations.
rng("default")
path = plan(planner,start,goal)path =
navPathControl with properties:
StatePropagator: [1×1 mobileRobotPropagator]
States: [192×3 double]
Controls: [191×2 double]
Durations: [191×1 double]
TargetStates: [191×3 double]
NumStates: 192
NumSegments: 191
Visualize Results
Visualize the map and plot the path states.
show(map) hold on plot(start(1),start(2),"rx") plot(goal(1),goal(2),"go") plot(path.States(:,1),path.States(:,2),"b") hold off
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line. One or more of the lines displays its values using only markers](../../examples/nav/win64/PlanKinodynamicPathWithControlsForMobileRobotExample_01.png)
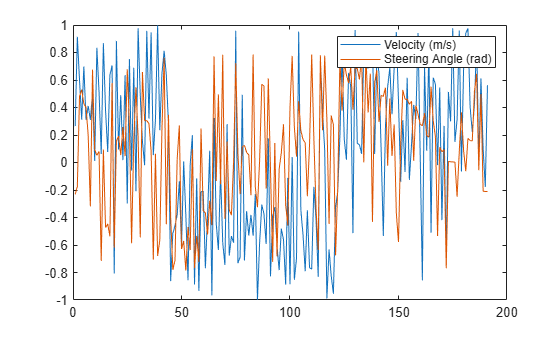
Display the [v psi] control inputs of forward velocity and steering angle.
plot(path.Controls) ylim([-1 1]) legend(["Velocity (m/s)","Steering Angle (rad)"])
Limitations
Deployment using MATLAB® Compiler™ is not supported when
KinematicModelis set to'ackermann'.
Version History
Introduced in R2021b