updateOccupancy
Update occupancy probability at locations
Syntax
Description
This MATLAB® function probabilistically integrates occupancy values into the occupancy values of an occupancy map.
updateOccupancy(
probabilistically integrates a matrix of occupancy
values, map,occMatrix)occMatrix, with the
current occupancy matrix of the occupancyMap object
map. The size of the matrix
must be equal to the GridSize
property of map.
updateOccupancy(
probabilistically integrates observation values,
map,locations,obs)obs, into the occupancy map
cells corresponding to the
n-by-2 matrix of world
coordinates locations.
Observation values are determined based on the
Inverse Sensor Model.
updateOccupancy(
probabilistically integrates an
m-by-n
matrix of observation values,
map,bottomLeft,obsMatrix)obsMatrix, into a subregion
in the map. Specify the bottom-left corner of the
subregion as a world position,
bottomLeft. The subregion
extends m rows up and
n columns to the right from the
specified position.
updateOccupancy(
probabilistically integrates an
m-by-n
matrix of observation values,
map,bottomLeft,obsMatrix,'world')obsMatrix, into a subregion
in the map. Specify the bottom-left corner of the
subregion as a world position,
bottomLeft. The subregion
extends m rows up and
n columns to the right from the
specified position.
updateOccupancy(
probabilistically integrates an
m-by-n
matrix of observation values,
map,bottomLeft,obsMatrix,'local')obsMatrix, into a subregion
in the map. Specify the bottom-left corner of the
subregion as a local position,
bottomLeft. The subregion
extends m rows up and
n columns to the right from the
specified position.
updateOccupancy(
probabilistically integrates an
m-by-n
matrix of observation values,
map,topLeft,obsMatrix,'grid')obsMatrix, into a subregion
in the map. Specify the top-left corner of the
subregion as a grid index,
topLeft. The subregion
extends m rows down and
n columns to the right from the
specified index.
Examples
Create an empty map of 10-by-10 meters in size.
map = occupancyMap(10,10,10);
Update the occupancy of specific world locations with new probability values and display the map.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; pvalues = [0.2; 0.4; 0.6; 0.8; 1]; updateOccupancy(map,[x y],pvalues) figure show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/CreateAndModifyAnOccupancyMapExample_01.png)
Inflate the occupied areas by a radius of 0.5 m. The larger occupancy values overwrite the smaller values.
inflate(map,0.5) figure show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/CreateAndModifyAnOccupancyMapExample_02.png)
Get the grid locations from the world locations.
ij = world2grid(map,[x y]);
Set occupancy values for the grid locations.
setOccupancy(map,ij,ones(5,1),'grid')
figure
show(map)![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/CreateAndModifyAnOccupancyMapExample_03.png)
Input Arguments
More About
The inverse sensor model
determines how values are set along a ray from a
range sensor reading to the obstacles in the map.
NaN range values are ignored.
Range values greater than
maxrange are not
updated.
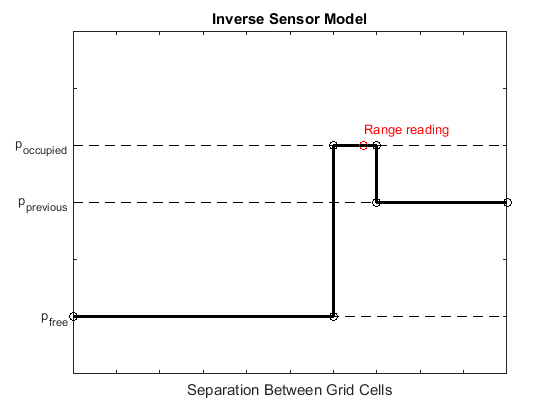
Grid locations that contain range readings are updated with the occupied probability. Locations before the reading are updated with the free probability. All locations after the reading are not updated.
Extended Capabilities
Version History
Introduced in R2019b