Generate Code for Path Planning Using Hybrid A Star
This example shows how to perform code generation to plan a collision-free path for a vehicle through a map using the Hybrid A* algorithm. After you verify the algorithm in MATLAB®, use the codegen (MATLAB Coder) function to generate a MEX function. Use the generated MEX file in the algorithm to visualize the planned path.
Write Algorithm to Plan Path
Create a function, codegenPathPlanner, that uses a plannerHybridAStar object to plan a path from the start pose to the goal pose in the map.
function path = codegenPathPlanner(mapData,startPose,goalPose) %#codegen % Create a binary occupancy map map = binaryOccupancyMap(mapData); % Create a state space object stateSpace = stateSpaceSE2; % Update state space bounds to be the same as map limits. stateSpace.StateBounds = [map.XWorldLimits;map.YWorldLimits;[-pi pi]]; % Construct a state validator object using the statespace and map object validator = validatorOccupancyMap(stateSpace,Map=map); % Set the validation distance for the validator validator.ValidationDistance = 0.01; % Assign the state validator object to the plannerHybridAStar object planner = plannerHybridAStar(validator); % Compute a path for the given start and goal poses pathObj = plan(planner,startPose,goalPose); % Extract the path poses from the path object path = pathObj.States; end
This function acts as a wrapper for a standard Hybrid A* path planning call. It accepts standard inputs and returns a collision-free path as an array. Because you cannot use a handle object as an input or output of a function that is supported for code generation, create the planner object inside the function. Save the codegenPathPlanner function in your current folder.
Verify Path Planning Algorithm in MATLAB
Verify the path planning algorithm in MATLAB before generating code.
Generate a random 2-D maze map.
map = mapMaze(5,MapSize=[25 25],MapResolution=1); mapData = occupancyMatrix(map);
Define start and goal poses as [x y theta] vectors. x and y specify the position in meters, and theta specifies the orientation angle in radians.
startPose = [3 3 pi/2]; goalPose = [22 22 pi/2];
Plan the path for the specified start pose, and goal pose, and map.
path = codegenPathPlanner(mapData,startPose,goalPose);
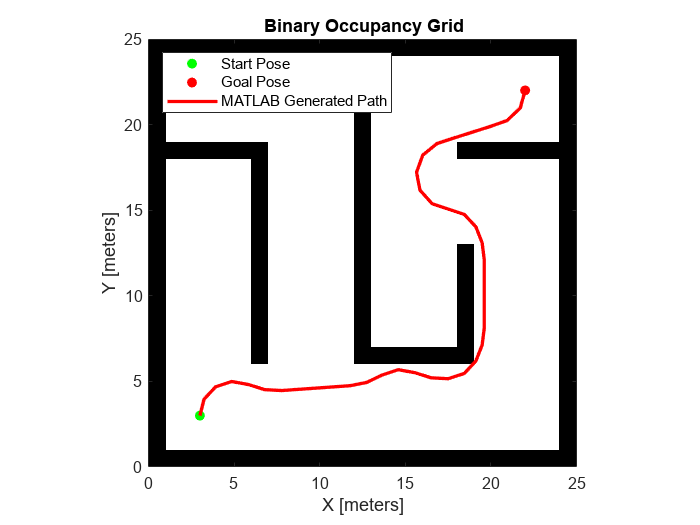
Visualize the computed path.
show(binaryOccupancyMap(mapData)) hold on % Start state scatter(startPose(1,1),startPose(1,2),"g","filled") % Goal state scatter(goalPose(1,1),goalPose(1,2),"r","filled") % Path plot(path(:,1),path(:,2),"r-",LineWidth=2) legend("Start Pose","Goal Pose","MATLAB Generated Path") legend(Location="northwest")
Generate Code for Path Planning Algorithm
You can use either the codegen (MATLAB Coder) function or the MATLAB Coder (MATLAB Coder) app to generate code. For this example, generate a MEX file by calling codegen at the MATLAB command line. Specify sample input arguments for each input to the function using the -args option and func_inputs input argument.
Call the codegen function and specify the input arguments in a cell array. This function creates a separate codegenPathPlanner_mex function to use. You can also produce C code by using the options input argument. This step can take some time.
codegen -config:mex codegenPathPlanner -args {mapData,startPose,goalPose}
Code generation successful.
Verify Results Using Generated MEX Function
Plan the path by calling the MEX version of the path planning algorithm for the specified start pose, and goal pose, and map.
mexPath = codegenPathPlanner_mex(mapData,startPose,goalPose);
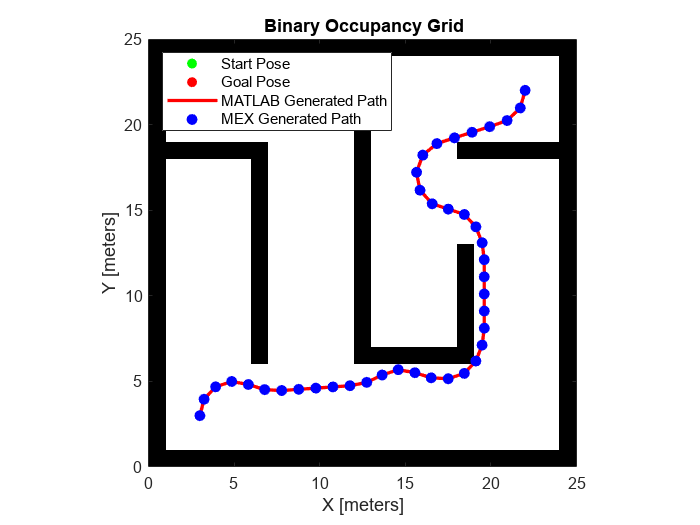
Visualize the path computed by the MEX version of the path planning algorithm.
scatter(mexPath(:,1),mexPath(:,2),... Marker="o",... MarkerFaceColor="b",... MarkerEdgeColor="b") legend("Start Pose","Goal Pose","MATLAB Generated Path","MEX Generated Path") legend(Location="northwest") hold off
Check Performance of Generated Code
Compare the execution time of the generated MEX function to the execution time of your original function by using timeit.
time = timeit(@() codegenPathPlanner(mapData,startPose,goalPose))
time = 0.3735
mexTime = timeit(@() codegenPathPlanner_mex(mapData,startPose,goalPose))
mexTime = 0.0474
time/mexTime
ans = 7.8872
In this example, the MEX function runs more than five times faster. Results may vary for your system.
Plan Path in New Map Using Generated MEX Function
Plan a path for a new start and goal poses in a new map. The size of the new map must be the same as the map used to generate the MEX function.
Generate a random 2-D maze map.
mapNew = mapMaze(5,MapSize=[25 25],MapResolution=1); mapDataNew = occupancyMatrix(mapNew);
Specify start and goal poses.
startPoseNew = [22 3 pi/2]; goalPoseNew = [3 22 pi/2];
Plan the path for the specified start pose, and goal pose, and map.
pathNew = codegenPathPlanner_mex(mapDataNew,startPoseNew,goalPoseNew);
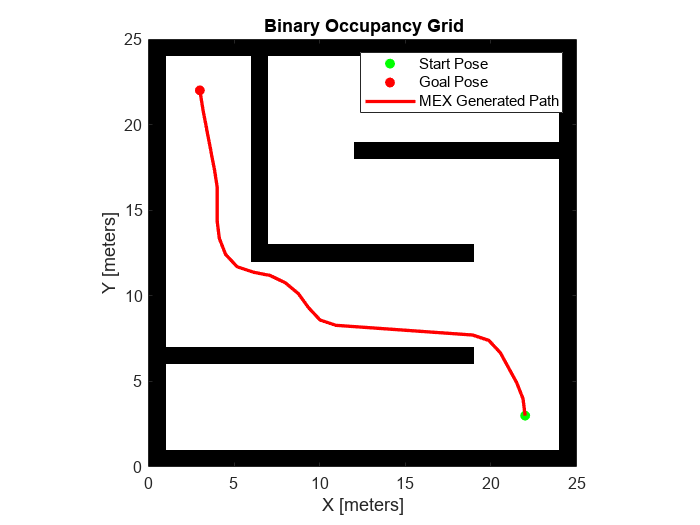
Visualize the new path computed by the MEX function.
show(binaryOccupancyMap(mapDataNew)) hold on % Start state scatter(startPoseNew(1,1),startPoseNew(1,2),"g","filled") % Goal state scatter(goalPoseNew(1,1),goalPoseNew(1,2),"r","filled") % Path plot(pathNew(:,1),pathNew(:,2),"r-",LineWidth=2) legend("Start Pose","Goal Pose","MEX Generated Path") legend(Location='northeast')