或者而不是和约束
一般来说,求解器采用隐式 AND 约束:
约束 1 AND 约束 2 AND 约束 3 全部满足。
但是,有时您需要一个 OR:
约束 1 或约束 2 或约束 3 得到满足。
这些表示在逻辑上并不等价,并且通常没有办法用 AND 约束来表达 OR 约束。
提示
幸运的是,非线性约束极其灵活。只需将非线性约束函数设置为约束函数的最小值,即可获得 OR 约束。
您可以将最小值设置为约束的原因是由于 非线性约束 的性质:您将它们作为一组在可行点必须为负的函数。如果您的约束为
F1(x) ≤ 0 或 F2(x) ≤ 0 或 F3(x) ≤ 0,
然后将非线性不等式约束函数 c(x)设置为:
c(x) = min(F1(x),F2(x),F3(x))。
由于最小值,c(x) 并不平滑,这是对约束函数的一般要求。尽管如此,该方法通常有效。
注意
您不能在 OR 约束中使用通常的边界和线性约束。相反,将边界和线性约束转换为非线性约束函数,如本例所示。
例如,假设可行区域是 L 形区域:x 位于矩形 –1 ≤ x(1) ≤ 1, 0 ≤ x(2) ≤ 1 内,或者 x 位于矩形 0 ≤ x(1) ≤ 1, –1 ≤ x(2) ≤ 1 内。
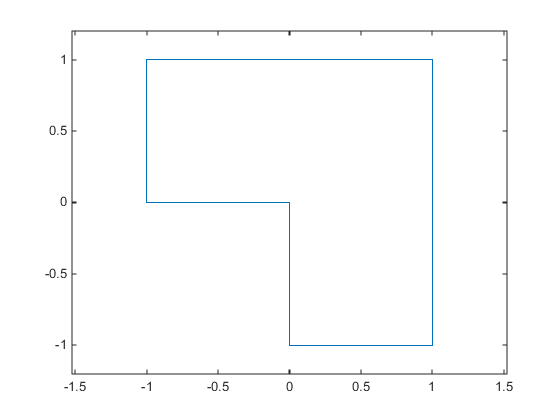
为了将矩形表示为非线性约束,而不是边界约束,构造一个在矩形内为负的函数 a ≤ x(1) ≤ b, c ≤ x(2) ≤ d:
function cout = rectconstr(x,a,b,c,d) % Negative when x is in the rectangle [a,b][c,d] % First check that a,b,c,d are in the correct order if (b <= a) || (d <= c) error('Give a rectangle a < b, c < d') end cout = max([(x(1)-b),(x(2)-d),(a-x(1)),(c-x(2))]);
按照使用非线性约束函数最小值的规定,对于 L 形区域,非线性约束函数为:
function [c,ceq] = rectconstrfcn(x) ceq = []; % no equality constraint F(1) = rectconstr(x,-1,1,0,1); % one rectangle F(2) = rectconstr(x,0,1,-1,1); % another rectangle c = min(F); % for OR constraints
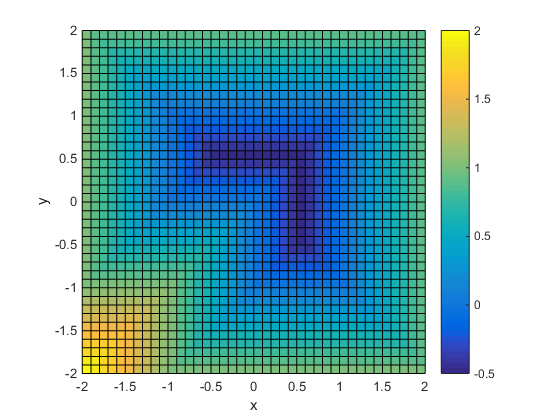
假设您的目标函数是
fun = @(x)exp(x(1)) * (4*x(1)^2 + 2*x(2)^2 + 4*x(1)*x(2) + 2*x(2) + 1);
在 L 形区域内最小化 fun:
opts = optimoptions(@fmincon,'Algorithm','interior-point','Display','off'); x0 = [-.5,.6]; % an arbitrary guess [xsol,fval,eflag] = fmincon(fun,x0,[],[],[],[],[],[],@rectconstrfcn,opts)
xsol =
0.4998 -0.9996
fval =
2.4650e-07
eflag =
1显然,解 xsol 位于 L 形区域内。退出标志为 1,表示 xsol 是局部最小值。