使用符号数学和 Optimization Toolbox 求解器
此示例显示如何使用 Symbolic Math Toolbox™ 函数 jacobian 和 matlabFunction 为优化求解器提供解析导数。当您提供目标函数和约束函数的梯度和 Hessian 时,Optimization Toolbox™ 求解器通常会更加准确和高效。
基于问题的优化可以自动计算并使用梯度;请参阅Optimization Toolbox 中的自动微分。有关使用自动微分的基于问题的示例,请参阅 使用优化变量的约束静电非线性优化。
在使用带有优化函数的符号计算时需要考虑以下几点:
优化目标和约束函数应该以向量的形式来定义,比如
x。但是,符号变量是标量或复值,而不是矢量值。这要求您在向量和标量之间进行转换。优化梯度,有时是 Hessians,应该在目标或约束函数的主体内计算。这意味着必须将符号梯度或 Hessian 放置在目标或约束函数文件或函数句柄中的适当位置。
以符号方式计算梯度和 Hessian 可能非常耗时。因此您应该只执行一次此计算,并通过
matlabFunction生成代码,以便在求解器执行期间调用。使用
subs函数评估符号表达式非常耗时。使用matlabFunction效率更高。matlabFunction生成取决于输入向量方向的代码。由于fmincon使用列向量调用目标函数,因此必须小心使用符号变量的列向量调用matlabFunction。
第一个示例:使用 Hessian 进行无约束最小化
要最小化的目标函数是:
该函数为正函数,在 x1 = 4/3、x2 =(4/3)^3 - 4/3 = 1.0370 处达到唯一最小值零...
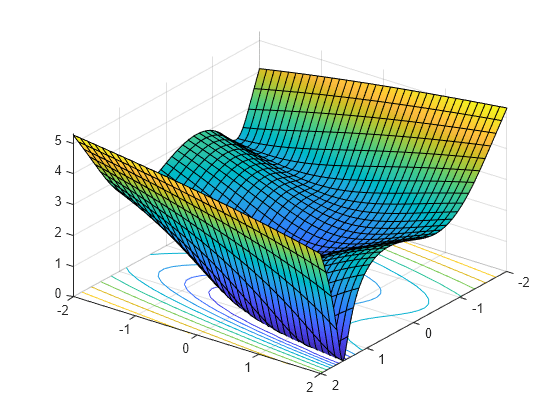
我们将独立变量写为 x1 和 x2,因为这种形式下它们可以用作符号变量。作为向量 x 的分量,它们将被写为 x(1) 和 x(2)。该函数有一个曲折的谷值,如下图所示。
syms x1 x2 real x = [x1;x2]; % column vector of symbolic variables f = log(1 + 3*(x2 - (x1^3 - x1))^2 + (x1 - 4/3)^2)
f =
fsurf(f,[-2 2],'ShowContours','on') view(127,38)
计算 f 的梯度和 Hessian:
gradf = jacobian(f,x).' % column gradfgradf =
hessf = jacobian(gradf,x)
hessf =
fminunc 求解器需要传入一个向量 x,并且将 SpecifyObjectiveGradient 选项设置为 true,将 HessianFcn 选项设置为 'objective',需要三个输出的列表:[f(x),gradf(x),hessf(x)]。
matlabFunction 从三个输入列表中生成这三个输出的列表。此外,使用 vars 选项,matlabFunction 接受向量输入。
fh = matlabFunction(f,gradf,hessf,'vars',{x});现在从点 [-1,2] 开始求解最小化问题:
options = optimoptions('fminunc', ... 'SpecifyObjectiveGradient', true, ... 'HessianFcn', 'objective', ... 'Algorithm','trust-region', ... 'Display','final'); [xfinal,fval,exitflag,output] = fminunc(fh,[-1;2],options)
Local minimum possible. fminunc stopped because the final change in function value relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
xfinal = 2×1
1.3333
1.0370
fval = 7.6623e-12
exitflag = 3
output = struct with fields:
iterations: 14
funcCount: 15
stepsize: 0.0027
cgiterations: 11
firstorderopt: 3.4391e-05
algorithm: 'trust-region'
message: 'Local minimum possible.↵↵fminunc stopped because the final change in function value relative to ↵its initial value is less than the value of the function tolerance.↵↵<stopping criteria details>↵↵Optimization stopped because the relative objective function value is changing↵by less than options.FunctionTolerance = 1.000000e-06.'
constrviolation: []
将其与不使用梯度或 Hessian 信息的迭代次数进行比较。这需要 'quasi-newton' 算法。
options = optimoptions('fminunc','Display','final','Algorithm','quasi-newton'); fh2 = matlabFunction(f,'vars',{x}); % fh2 = objective with no gradient or Hessian [xfinal,fval,exitflag,output2] = fminunc(fh2,[-1;2],options)
Local minimum found. Optimization completed because the size of the gradient is less than the value of the optimality tolerance. <stopping criteria details>
xfinal = 2×1
1.3333
1.0371
fval = 2.1985e-11
exitflag = 1
output2 = struct with fields:
iterations: 18
funcCount: 81
stepsize: 2.1164e-04
lssteplength: 1
firstorderopt: 2.4587e-06
algorithm: 'quasi-newton'
message: 'Local minimum found.↵↵Optimization completed because the size of the gradient is less than↵the value of the optimality tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The first-order optimality measure, 9.625976e-07, is less ↵than options.OptimalityTolerance = 1.000000e-06.'
使用梯度和 Hessians 时,迭代次数较低,并且函数计算也显著减少:
sprintf(['There were %d iterations using gradient' ... ' and Hessian, but %d without them.'], ... output.iterations,output2.iterations)
ans = 'There were 14 iterations using gradient and Hessian, but 18 without them.'
sprintf(['There were %d function evaluations using gradient' ... ' and Hessian, but %d without them.'], ... output.funcCount,output2.funcCount)
ans = 'There were 15 function evaluations using gradient and Hessian, but 81 without them.'
第二个示例:使用 fmincon 内点算法进行约束最小化
我们考虑相同的目标函数和起点,但现在有两个非线性约束:
这些约束使优化远离全局最小值点 [1.333,1.037]。可视化这两个约束:
[X,Y] = meshgrid(-2:.01:3); Z = (5*sinh(Y./5) >= X.^4); % Z=1 where the first constraint is satisfied, Z=0 otherwise Z = Z+ 2*(5*tanh(X./5) >= Y.^2 - 1); % Z=2 where the second is satisfied, Z=3 where both are surf(X,Y,Z,'LineStyle','none'); fig = gcf; fig.Color = 'w'; % white background view(0,90) hold on plot3(.4396, .0373, 4,'o','MarkerEdgeColor','r','MarkerSize',8); % best point xlabel('x') ylabel('y') hold off
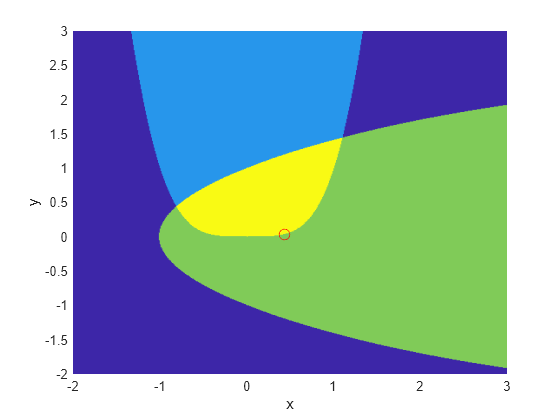
我们在最佳点周围画了一个小红圈。
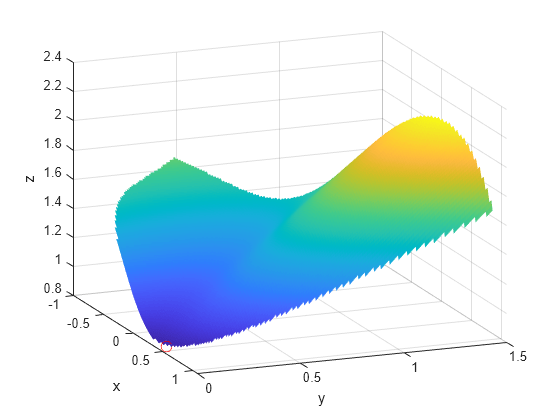
这是目标函数在可行域(即满足两个约束的区域)上的图,如上图深红色部分所示,最优点周围有一个小红圈:
W = log(1 + 3*(Y - (X.^3 - X)).^2 + (X - 4/3).^2); % W = the objective function W(Z < 3) = nan; % plot only where the constraints are satisfied surf(X,Y,W,'LineStyle','none'); view(68,20) hold on plot3(.4396, .0373, .8152,'o','MarkerEdgeColor','r', ... 'MarkerSize',8); % best point xlabel('x') ylabel('y') zlabel('z') hold off
非线性约束必须写成 c(x) <= 0 的形式。我们计算所有符号约束及其导数,并使用 matlabFunction 将它们放在函数句柄中。
约束的梯度应该是列向量;它们必须作为矩阵放置在目标函数中,矩阵的每一列代表一个约束函数的梯度。这是由 jacobian 生成的形式的转置,因此我们在下面取转置。
我们将非线性约束放入函数句柄中。fmincon 期望非线性约束和梯度按 [c ceq gradc gradceq] 的顺序输出。由于没有非线性等式约束,我们为 [] 和 ceq 输出 gradceq。
c1 = x1^4 - 5*sinh(x2/5); c2 = x2^2 - 5*tanh(x1/5) - 1; c = [c1 c2]; gradc = jacobian(c,x).'; % transpose to put in correct form constraint = matlabFunction(c,[],gradc,[],'vars',{x});
内点算法要求将其 Hessian 函数写为单独的函数,而不是作为目标函数的一部分。这是因为非线性约束函数需要在其 Hessian 中包含这些约束。它的 Hessian 是拉格朗日的 Hessian;有关更多信息,请参阅用户指南。
Hessian 函数接受两个输入参量:位置向量 x 和拉格朗日乘数结构 lambda。用于非线性约束的 lambda 结构部分是 lambda.ineqnonlin 和 lambda.eqnonlin。对于当前约束,没有线性等式,因此我们使用两个乘数 lambda.ineqnonlin(1) 和 lambda.ineqnonlin(2)。
我们在第一个示例中计算了目标函数的 Hessian。现在我们计算两个约束函数的 Hessians 矩阵,并使用 matlabFunction 制作函数句柄版本。
hessc1 = jacobian(gradc(:,1),x); % constraint = first c column hessc2 = jacobian(gradc(:,2),x); hessfh = matlabFunction(hessf,'vars',{x}); hessc1h = matlabFunction(hessc1,'vars',{x}); hessc2h = matlabFunction(hessc2,'vars',{x});
为了得到最终的 Hessian,我们将三个 Hessian 放在一起,并将适当的拉格朗日乘数添加到约束函数中。
myhess = @(x,lambda)(hessfh(x) + ... lambda.ineqnonlin(1)*hessc1h(x) + ... lambda.ineqnonlin(2)*hessc2h(x));
设置选项使用内点算法、梯度和 Hessian,让目标函数返回目标和梯度,然后运行求解器:
options = optimoptions('fmincon', ... 'Algorithm','interior-point', ... 'SpecifyObjectiveGradient',true, ... 'SpecifyConstraintGradient',true, ... 'HessianFcn',myhess, ... 'Display','final'); % fh2 = objective without Hessian fh2 = matlabFunction(f,gradf,'vars',{x}); [xfinal,fval,exitflag,output] = fmincon(fh2,[-1;2],... [],[],[],[],[],[],constraint,options)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
xfinal = 2×1
0.4396
0.0373
fval = 0.8152
exitflag = 1
output = struct with fields:
iterations: 10
funcCount: 13
constrviolation: 0
stepsize: 1.9160e-06
algorithm: 'interior-point'
firstorderopt: 1.9217e-08
cgiterations: 0
message: 'Local minimum found that satisfies the constraints.↵↵Optimization completed because the objective function is non-decreasing in ↵feasible directions, to within the value of the optimality tolerance,↵and constraints are satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The relative first-order optimality measure, 1.846461e-08,↵is less than options.OptimalityTolerance = 1.000000e-06, and the relative maximum constraint↵violation, 0.000000e+00, is less than options.ConstraintTolerance = 1.000000e-06.'
bestfeasible: [1×1 struct]
同样,在提供梯度和 Hessian 的情况下,求解器进行的迭代和函数计算比没有提供时少得多:
options = optimoptions('fmincon','Algorithm','interior-point',... 'Display','final'); % fh3 = objective without gradient or Hessian fh3 = matlabFunction(f,'vars',{x}); % constraint without gradient: constraint = matlabFunction(c,[],'vars',{x}); [xfinal,fval,exitflag,output2] = fmincon(fh3,[-1;2],... [],[],[],[],[],[],constraint,options)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
xfinal = 2×1
0.4396
0.0373
fval = 0.8152
exitflag = 1
output2 = struct with fields:
iterations: 17
funcCount: 54
constrviolation: 0
stepsize: 7.1892e-07
algorithm: 'interior-point'
firstorderopt: 3.8435e-07
cgiterations: 0
message: 'Local minimum found that satisfies the constraints.↵↵Optimization completed because the objective function is non-decreasing in ↵feasible directions, to within the value of the optimality tolerance,↵and constraints are satisfied to within the value of the constraint tolerance.↵↵<stopping criteria details>↵↵Optimization completed: The relative first-order optimality measure, 3.693006e-07,↵is less than options.OptimalityTolerance = 1.000000e-06, and the relative maximum constraint↵violation, 0.000000e+00, is less than options.ConstraintTolerance = 1.000000e-06.'
bestfeasible: [1×1 struct]
sprintf(['There were %d iterations using gradient' ... ' and Hessian, but %d without them.'],... output.iterations,output2.iterations)
ans = 'There were 10 iterations using gradient and Hessian, but 17 without them.'
sprintf(['There were %d function evaluations using gradient' ... ' and Hessian, but %d without them.'], ... output.funcCount,output2.funcCount)
ans = 'There were 13 function evaluations using gradient and Hessian, but 54 without them.'
清理符号变量
本例中使用的符号变量被假定为实数。要从符号引擎工作区中清除这个假设,仅仅删除变量是不够的。您必须使用语法清除变量的假设
assume([x1,x2],'clear')当以下命令输出为空时,所有假设均被清除
assumptions([x1,x2])
ans = Empty sym: 1-by-0