使用 Symbolic Math Toolbox 计算梯度和 Hessian
此示例显示如何使用 fmincon 和 Symbolic Math Toolbox™ 函数获得更快、更稳健的非线性优化问题解。如果您有 Symbolic Math Toolbox 许可证,您可以使用这些 Symbolic Math Toolbox 函数轻松计算目标和约束函数的解析梯度和 Hessians:
jacobian(Symbolic Math Toolbox) 生成标量函数的梯度,并生成向量函数的偏导数矩阵。因此,例如,您可以通过将jacobian应用于梯度来获得 Hessian 矩阵(目标函数的二阶导数)。此示例展示如何使用jacobian生成目标和约束函数的符号梯度和 Hessian。matlabFunction(Symbolic Math Toolbox) 生成一个匿名函数或一个计算符号表达式的值的文件。此示例显示如何使用matlabFunction生成评估任意点处的目标和约束函数及其导数的文件。
Symbolic Math Toolbox 函数与 Optimization Toolbox™ 函数相比具有不同的语法和结构。具体来说,符号变量是实数或复数标量,而 Optimization Toolbox 函数传递向量参量。因此,您需要采取几个步骤来以适合 fmincon 内点算法的形式符号化生成目标函数、约束及其所有必要的导数。
基于问题的优化可以自动计算并使用梯度;请参阅Optimization Toolbox 中的自动微分。有关使用自动微分求解该问题的基于问题的方法,请参阅 使用优化变量的约束静电非线性优化。
问题描述
考虑将 10 个电子放置在导体中的静电问题。电子以最小化其总势能的方式排列,但受到位于体内的约束。所有电子至少都在物体的边界上。电子是无法区分的,因此该问题不存在唯一的最小值(在一个解中排列电子会给出另一个有效的解)。此示例受到 Dolan、Moré 和 Munson [58] 的启发。
此示例是由不等式定义的导体
.
这个身体看上去就像球体上的一个金字塔。
[X,Y] = meshgrid(-1:.01:1); Z1 = -abs(X) - abs(Y); Z2 = -1 - sqrt(1 - X.^2 - Y.^2); Z2 = real(Z2); W1 = Z1; W2 = Z2; W1(Z1 < Z2) = nan; % Only plot points where Z1 > Z2 W2(Z1 < Z2) = nan; % Only plot points where Z1 > Z2 hand = figure; % Handle to the figure, for more plotting later set(gcf,'Color','w') % White background surf(X,Y,W1,'LineStyle','none'); hold on surf(X,Y,W2,'LineStyle','none'); view(-44,18)
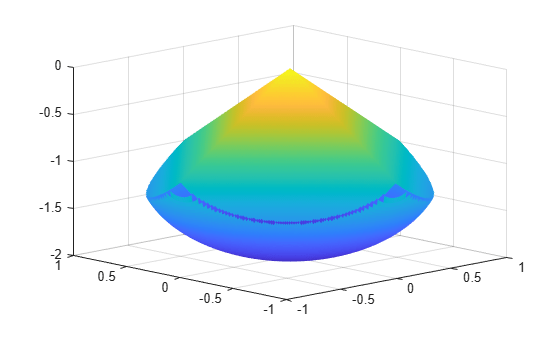
图形的上下表面之间存在微小的间隙。这个间隙是用于创建图形的一般绘图程序的产物。该程序将擦除一个表面上与另一个表面接触的任何矩形斑块。
创建变量
生成一个符号向量 x,作为由实数符号变量 xij 组成的 30×1 向量,其中 i 介于 1 和 10 之间,j 介于 1 和 3 之间。这些变量代表电子 i 的三个坐标:xi1 对应 坐标,xi2 对应 坐标,xi3 对应 坐标。
x = cell(3, 10); for i = 1:10 for j = 1:3 x{j,i} = sprintf('x%d%d',i,j); end end x = x(:); % Now x is a 30-by-1 vector x = sym(x, 'real');
显示向量 x。
x
x =
包括线性约束
编写线性约束
对于每个电子,有一组四个线性不等式:
xi3 - xi1 - xi2 ≤ 0 xi3 - xi1 + xi2 ≤ 0 xi3 + xi1 - xi2 ≤ 0 xi3 + xi1 + xi2 ≤ 0
所以,这道题总共有 40 个线性不等式。
以结构化的方式写出不等式。
B = [1,1,1;-1,1,1;1,-1,1;-1,-1,1]; A = zeros(40,30); for i=1:10 A(4*i-3:4*i,3*i-2:3*i) = B; end b = zeros(40,1);
您可以看到 A*x ≤ b 代表不等式。
disp(A*x)
创建非线性约束及其梯度和 Hessian
非线性约束也是结构化的。
.
生成约束及其梯度和 Hessian。
c = sym(zeros(1,10)); i = 1:10; c = (x(3*i-2).^2 + x(3*i-1).^2 + (x(3*i)+1).^2 - 1).'; gradc = jacobian(c,x).'; % .' performs transpose hessc = cell(1, 10); for i = 1:10 hessc{i} = jacobian(gradc(:,i),x); end
约束向量 c 是行向量,c(i) 的梯度表示在矩阵 i 的第 gradc 列。这种形式是正确的,如非线性约束所述。
Hessian 矩阵 hessc{1}、...、hessc{10} 是方阵且对称。此示例将它们存储在元胞数组中,这比将它们存储在单独的变量(例如 hessc1, ..., hessc10)中更好。
使用 .' 语法进行转置。' 语法表示共轭转置,它具有不同的符号导数。
创建目标函数及其梯度和 Hessian
目标函数,势能,是每个电子对之间距离的倒数的总和。
.
距离是向量各个分量之差的平方和的平方根。
计算能量(目标函数)及其梯度和 Hessian。
energy = sym(0); for i = 1:3:25 for j = i+3:3:28 dist = x(i:i+2) - x(j:j+2); energy = energy + 1/sqrt(dist.'*dist); end end gradenergy = jacobian(energy,x).'; hessenergy = jacobian(gradenergy,x);
创建目标函数文件
目标函数有两个输出,energy 和 gradenergy。调用 matlabFunction 时将两个函数放在一个向量中,以减少 matlabFunction 生成的子表达式的数量,并且仅当调用函数(在本例中为 fmincon)请求两个输出时才返回梯度。您可以将生成的文件放在 MATLAB 路径上的任何文件夹中。在这种情况下,将它们放在当前文件夹中。
currdir = [pwd filesep]; % You might need to use currdir = pwd filename = [currdir,'demoenergy.m']; matlabFunction(energy,gradenergy,'file',filename,'vars',{x});
matlabFunction 返回 energy 作为第一个输出,返回 gradenergy 作为第二个输出。该函数还采用单个输入向量 {x},而不是输入列表 x11, ..., x103。
生成的文件 demoenergy.m 包含以下行或类似内容:
function [energy,gradenergy] = demoenergy(in1) %DEMOENERGY % [ENERGY,GRADENERGY] = DEMOENERGY(IN1) ... x101 = in1(28,:); ... energy = 1./t140.^(1./2) + ...; if nargout > 1 ... gradenergy = [(t174.*(t185 - 2.*x11))./2 - ...]; end
此函数具有带梯度的目标函数的正确形式;请参阅 编写标量目标函数。
创建约束函数文件
生成非线性约束函数,并将其置于正确的格式。
filename = [currdir,'democonstr.m']; matlabFunction(c,[],gradc,[],'file',filename,'vars',{x},... 'outputs',{'c','ceq','gradc','gradceq'});
生成的文件 democonstr.m 包含以下行或类似内容:
function [c,ceq,gradc,gradceq] = democonstr(in1) %DEMOCONSTR % [C,CEQ,GRADC,GRADCEQ] = DEMOCONSTR(IN1) ... x101 = in1(28,:); ... c = [t417.^2 + ...]; if nargout > 1 ceq = []; end if nargout > 2 gradc = [2.*x11,...]; end if nargout > 3 gradceq = []; end
此函数具有带梯度的约束函数的正确形式;请参阅 非线性约束。
生成 Hessian 文件
为了生成该问题的拉格朗日 Hessian,首先生成能量 Hessian 和约束 Hessian 文件。
目标函数的 Hessian 矩阵 hessenergy 是一个包含超过 150,000 个符号的大型符号表达式,如评估 size(char(hessenergy)) 所示。因此,运行 matlabFunction(hessenergy) 需要大量时间。
生成文件 hessenergy.m。
filename = [currdir,'hessenergy.m']; matlabFunction(hessenergy,'file',filename,'vars',{x});
相比之下,约束函数的 Hessian 很小,计算速度很快。
for i = 1:10 ii = num2str(i); thename = ['hessc',ii]; filename = [currdir,thename,'.m']; matlabFunction(hessc{i},'file',filename,'vars',{x}); end
生成目标和约束的所有文件后,将它们与辅助函数 hessfinal.m 中的相应拉格朗日乘数一起放入其中,该函数的代码出现在本示例的末尾。
运行优化
从以 [0,0,-1] 为中心、半径为 1/2 的球体上随机分布的电子开始优化。
rng default % For reproducibility Xinitial = randn(3,10); % Columns are normal 3-D vectors for j=1:10 Xinitial(:,j) = Xinitial(:,j)/norm(Xinitial(:,j))/2; % This normalizes to a 1/2-sphere end Xinitial(3,:) = Xinitial(3,:) - 1; % Center at [0,0,-1] Xinitial = Xinitial(:); % Convert to a column vector
设置选项以使用 interior-point 算法,并使用梯度和 Hessian。
options = optimoptions(@fmincon,'Algorithm','interior-point','SpecifyObjectiveGradient',true,... 'SpecifyConstraintGradient',true,'HessianFcn',@hessfinal,'Display','final');
调用 fmincon。
[xfinal,fval,exitflag,output] = fmincon(@demoenergy,Xinitial,...
A,b,[],[],[],[],@democonstr,options);Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
查看目标函数值、退出标志、迭代次数和函数计算次数。
disp(fval)
34.1365
disp(exitflag)
1
disp(output.iterations)
19
disp(output.funcCount)
28
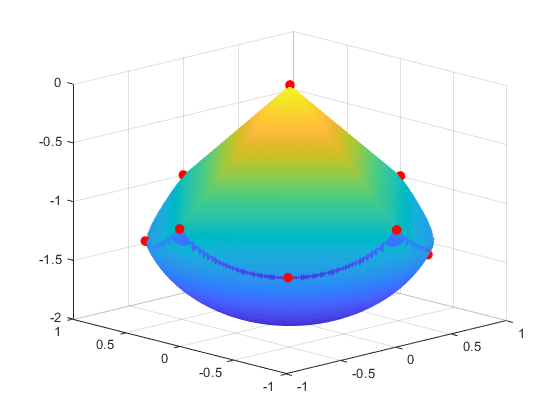
尽管电子的初始位置是随机的,但最终位置几乎是对称的。
for i = 1:10 plot3(xfinal(3*i-2),xfinal(3*i-1),xfinal(3*i),'r.','MarkerSize',25); end
要检查整个 3-D 几何形状,请旋转图形。
rotate3d
figure(hand)
与不使用梯度和 Hessian 的优化进行比较
梯度和 Hessians 的使用使得优化运行得更快、更准确。为了比较不使用梯度或 Hessian 信息的相同优化,请将选项设置为不使用梯度和 Hessian。
options = optimoptions(@fmincon,'Algorithm','interior-point',... 'Display','final'); [xfinal2,fval2,exitflag2,output2] = fmincon(@demoenergy,Xinitial,... A,b,[],[],[],[],@democonstr,options);
Feasible point with lower objective function value found. Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
查看目标函数值、退出标志、迭代次数和函数计算次数。
disp(fval2)
34.1365
disp(exitflag2)
1
disp(output2.iterations)
77
disp(output2.funcCount)
2434
比较有和没有导数信息的迭代次数和函数计算次数。
tbl = table([output.iterations;output2.iterations],[output.funcCount;output2.funcCount],... 'RowNames',{'With Derivatives','Without Derivatives'},'VariableNames',{'Iterations','Fevals'})
tbl=2×2 table
Iterations Fevals
__________ ______
With Derivatives 19 28
Without Derivatives 77 2434
清除符号变量假设
本例中的符号变量假设它们在符号引擎工作区中是真实的。删除变量并不会从符号引擎工作区中清除这个假设。使用 syms 清除变量假设。
syms x验证假设是否为空。
assumptions(x)
ans = Empty sym: 1-by-0
辅助函数
以下代码创建 hessfinal 辅助函数。
function H = hessfinal(X,lambda) % % Call the function hessenergy to start H = hessenergy(X); % Add the Lagrange multipliers * the constraint Hessians H = H + hessc1(X) * lambda.ineqnonlin(1); H = H + hessc2(X) * lambda.ineqnonlin(2); H = H + hessc3(X) * lambda.ineqnonlin(3); H = H + hessc4(X) * lambda.ineqnonlin(4); H = H + hessc5(X) * lambda.ineqnonlin(5); H = H + hessc6(X) * lambda.ineqnonlin(6); H = H + hessc7(X) * lambda.ineqnonlin(7); H = H + hessc8(X) * lambda.ineqnonlin(8); H = H + hessc9(X) * lambda.ineqnonlin(9); H = H + hessc10(X) * lambda.ineqnonlin(10); end