nullweights
Description
W = nullweights(pos,angd,angn)W, of the sensor array defined in
pos, for the desired direction specified in angd
while generating nulls in the directions specified in angn.
W is an N-element column vector containing the
beamforming weights. N is the number of elements in the sensor array and
elements are assumed to be isotropic.
Examples
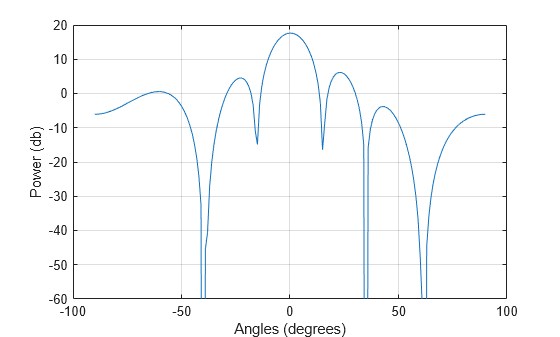
Beamform an 8-element ULA towards boresight and null out interference from, , and azimuth angle.
Create eight isotropic sensors on a ULA one-half wavelength apart.
N = 8; antposn = (0:N-1)*0.5;
Set the signal arrival angle and interference arrival angles.
angd = 0; angn = [-40 35 62];
Solve for the nulling weights.
nullwts = nullweights(antposn,angd,angn);
Find and plot the array factor in the span to .
angplot = -90:90; af = arrayfactor(antposn,angplot,nullwts);
Plot the array factor.
plot(angplot,mag2db(abs(af))) xlabel("Angles (degrees)") ylabel("Power (db)") ylim([-60 20]) grid on
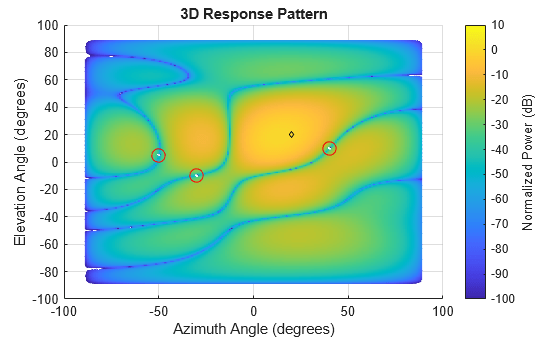
Using a square 4-by-4 URA array, steer three nulls scanning both in the azimuth and elevation directions. The array operates at 300 MHz.
First, create a 4-by-4 URA with cosine antenna elements spaced at half-wavelength.
ant = phased.URA(4,0.5, ...
Element = phased.CosineAntennaElement);Steer the array to azimuth and elevation. Place the nulls at
Azimuth | Elevation |
angd = [20;20];
angn = [40 -30 -50;10 -10 5];
c = physconst("LightSpeed");
fc = 300e6;
lambda = c/fc;Compute the nulling weights.
wn = nullweights( ...
getElementPosition(ant)/lambda,angd,angn);Display the array beam power pattern with the location of the MRA and the nulls.
pattern(ant,fc,Type = "powerdb", ... CoordinateSystem = "rectangular", ... Weights = wn) view(0,90) hold on plot(angd(1),angd(2),"kd", ... MarkerSize = 3) plot(angn(1,:),angn(2,:),"ro", ... MarkerSize = 10) hold off
Input Arguments
Output Arguments
References
[1] Harry Van Trees, Optimum Array Processing, 2002
[2] Sidney Applebaum, Adaptive Arrays, IEEE Transactions on Antennas and Propagation, Vol. AP-24, No. 5, September 1976.
Version History
Introduced in R2026a