Code Generation
MATLAB® Coder™ generates standalone C/C++ code from Robotics System Toolbox™ functions and classes that have been enabled to support code generation. Using the toolbox with MATLAB Coder, you can generate ANSI-compliant C code or MEX functions.
To view a full list of code generation support, see Functions Supporting Code Generation. You can also view the Extended Capabilities section on any reference page.
Topics
- Accelerate Robotics Algorithms with Code Generation
Generate code for select Robotics System Toolbox algorithms to speed up their execution.
- Code Generation from MATLAB Code
Several Robotics System Toolbox functions are enabled to generate C/C++ code.
- Code Generation Support
To generate code from MATLAB code that contains Robotics System Toolbox functions, classes, or System objects, you must have the MATLAB Coder software.
Featured Examples

Generate Code for Inverse Kinematics Computation Using Robot from Robot Library
Perform code generation for computing Inverse Kinematics of Kinova® Gen3 manipulator, solving for desired end-effector positions.
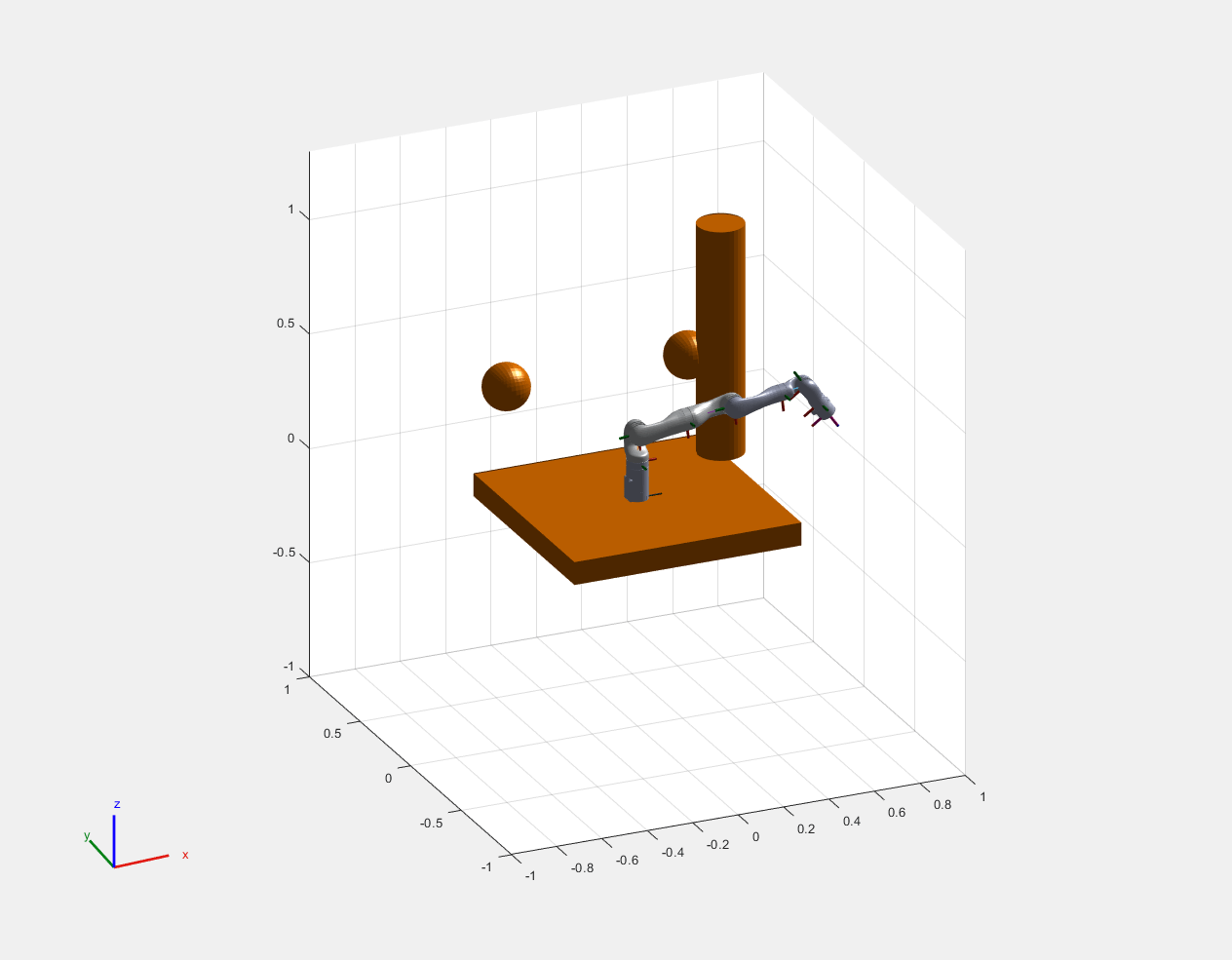
Generate Code for Manipulator Motion Planning in Perceived Environment
Generate code for motion planning in environments with variable obstacles by homogenizing collision objects into meshes.
Generate Automated ros_control Plugin for 3-D Shape Tracing Manipulator
Configure Simulink® model as a 3-D shape tracing controller, and generate and deploy C++ code for the ros_control package.
Generate Code for Motion Planning Using Robot Model Imported from URDF
Generate code for obstacle-free motion planning using robot model imported from URDF and visualize with MEX in MATLAB.