chompSolverOptions
Description
The chompSolverOptions object stores Covariant Hamiltonian
Optimization for Motion Planning (CHOMP) solver options that you can use to
change the behavior of the solver.
Creation
Description
OPTS = chompSolverOptions creates a solver options object
OPTS that you can use to set options for a
manipulatorCHOMP object to optimize a trajectory.
OPTS = chompSolverOptions(Name=Value) specifies properties using
one or more name-value arguments.
Properties
Examples
Load a robot model into the workspace, and create a CHOMP solver.
robot = loadrobot("kinovaGen3",DataFormat="row"); chomp = manipulatorCHOMP(robot);
Create spheres to represent obstacles, and add them to the CHOMP solver.
env = [0.20 0.2 -0.1 -0.1; % sphere, radius 0.20 at (0.2,-0.1,-0.1) 0.15 0.2 0.0 0.5]'; % sphere, radius 0.15 at (0.2,0.0,0.5) chomp.SphericalObstacles = env;
To prioritize a collision-free trajectory, set the smoothness cost weight to a lower value than the collision cost weight. Then add the options to the CHOMP solver.
chomp.SmoothnessOptions = chompSmoothnessOptions(SmoothnessCostWeight=1e-3);
chomp.CollisionOptions = chompCollisionOptions(CollisionCostWeight=10);
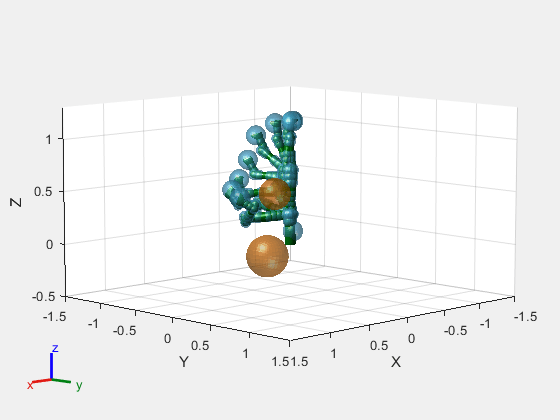
chomp.SolverOptions = chompSolverOptions(Verbosity="none",LearningRate=7.0);Initialize a trajectory, optimize it using the CHOMP solver, and show the waypoints in a figure.
startconfig = homeConfiguration(robot); goalconfig = [0.5 1.75 -2.25 2.0 0.3 -1.65 -0.4]; timepoints = [0 5]; timestep = 0.1; trajtype = "minjerkpolytraj"; [wptsamples,tsamples] = optimize(chomp, ... [startconfig; goalconfig], ... timepoints, ... timestep, ... InitialTrajectoryFitType=trajtype); show(chomp,wptsamples,NumSamples=10); zlim([-0.5 1.3])
References
[1] Ratliff, Nathan, Siddhartha Srinivasa, Matt Zucker, and Andrew Bagnell. “CHOMP: Gradient Optimization Techniques for Efficient Motion Planning.” In 2009 IEEE International Conference on Robotics and Automation, 489–94. Kobe, Japan: IEEE, 2009. https://doi.org/10.1109/ROBOT.2009.5152817.
Extended Capabilities
Version History
Introduced in R2023a
See Also
optimize | chompSmoothnessOptions | chompCollisionOptions | manipulatorCHOMP