getTransform
Syntax
Description
tform = getTransform(frames,targetframe,sourceframe)sourceFrame
coordinate frame to the targetFrame. By default, this function uses the
last timestamp for both frames specified in frames.
tform = getTransform(frames,targetframe,sourceframe,timestamp)frames, the function performs interpolation
using a constant velocity assumption for linear motion, and spherical linear interpolation
(SLERP) for angular motion.
Examples
Create a transform tree.
tree = transformTree;
Insert a frame called "base" with different poses at times 0 and 1 seconds.
updateTransform(tree,"root","base",trvec2tform([1 0 0]),0); updateTransform(tree,"root","base",trvec2tform([2 0 0]),1);
Query the transform from "base" to "root" at time 0.5 seconds.
getTransform(tree,"root","base",0.5)
ans = 4×4
1.0000 0 0 1.5000
0 1.0000 0 0
0 0 1.0000 0
0 0 0 1.0000
Visualize the current state of the transform tree.
show(tree);
title("Transform Tree")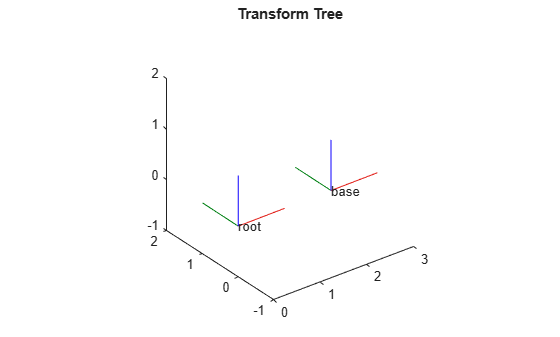
Input Arguments
Output Arguments
Version History
Introduced in R2022a