Perform Co-Simulation Between Simulink and Gazebo
This example shows how to set up a synchronized simulation between Simulink™ and Gazebo to send commands and receive data from Gazebo.
Setup Gazebo Simulation Environment
For this example, use your own Linux environment with Gazebo or download the provided Virtual Machine with ROS and Gazebo. In the virtual machine (VM), the required Gazebo plugin is located in /home/user/src/GazeboPlugin.
For more information on the Linux VM and the requirements for setting up your own Linux environment with Gazebo, see Gazebo Simulation Environment Requirements and Limitations.
In the VM settings disable Accelerate 3D graphics. In VM settings, VM > Settings > Hardware > Display, disable Accelerate 3D graphics.
If using your own Linux environment, follow the steps in Install Gazebo Plugin Manually. Otherwise, go to Launch Gazebo Simulation Environment.
Install Gazebo Plugin Manually
Obtain the plugin source code as a zip package. This function creates a folder called GazeboPlugin in your current working directory and compresses it as GazeboPlugin.zip.
packageGazeboPlugin
Copy the GazeboPlugin.zip to your Linux machine that meets the following requirement:
Unzip the package on your Linux platform, for this example we unpack to /home/user/src/GazeboPlugin.
Run these commands in the terminal to compile the plugin.
cd /home/user/src/GazeboPlugin
If the build folder already exists, remove it.
rm -r build
Install the plugin.
mkdir build cd build cmake .. make
The plugin location is /home/user/src/GazeboPlugin/export/lib/libGazeboCoSimPlugin.so.
Remove the generated plugin from host computer.
if exist('GazeboPlugin', 'dir') rmdir('GazeboPlugin', 's'); end if exist('GazeboPlugin.zip', 'file') delete('GazeboPlugin.zip'); end
Launch Gazebo Simulation Environment
Open a terminal in the VM or your own Linux operating system, run the following commands to launch the Gazebo simulator.
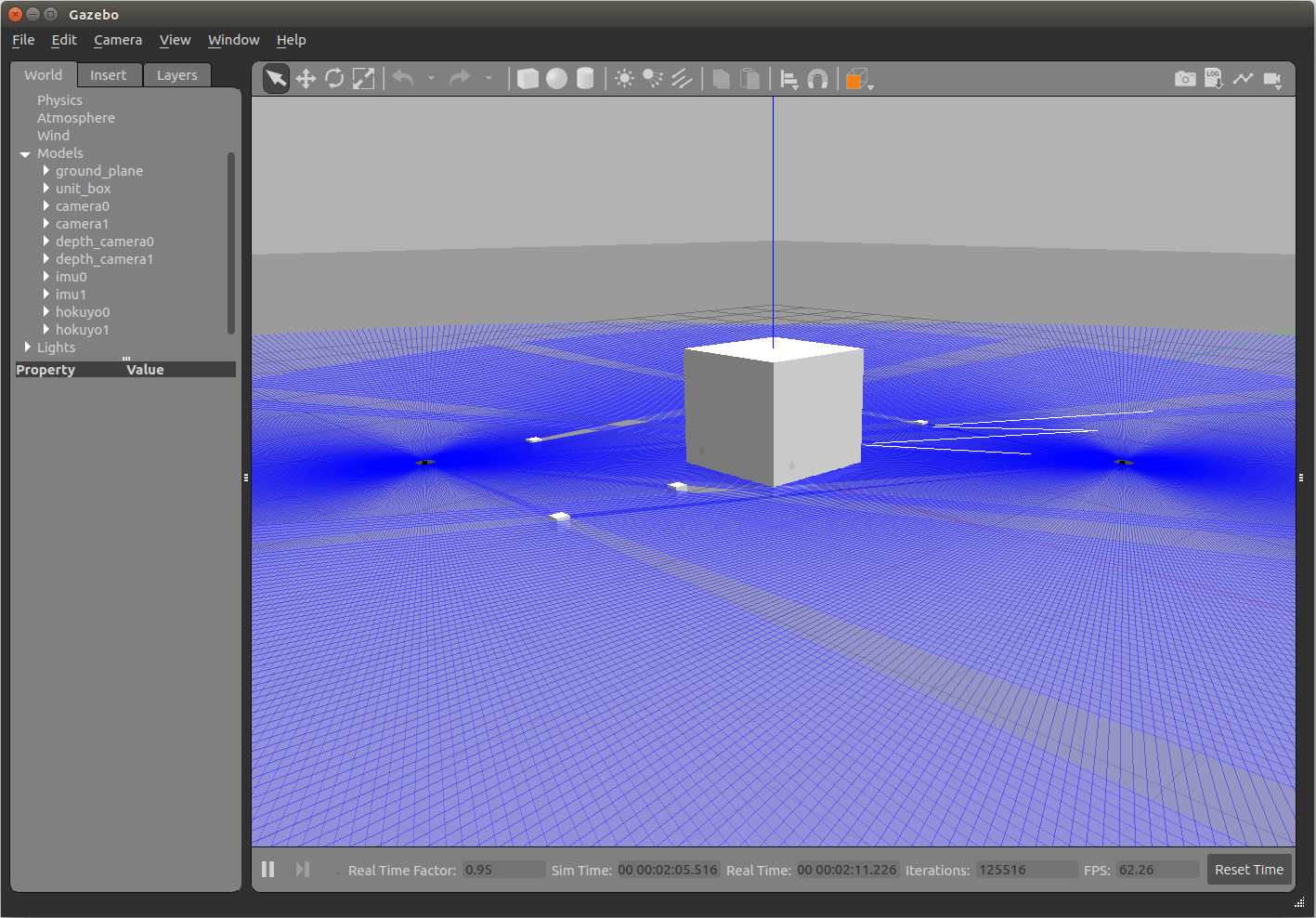
cd /home/user/src/GazeboPlugin/export export SVGA_VGPU10=0 gazebo ../world/multiSensorPluginTest.world --verbose
These commands launch a Gazebo simulator with:
Two laser range finders:
hokuyo0andhokuyo1Two RGB cameras:
camera0andcamera1Two depth cameras:
depth_camera0anddepth_camera1Two IMU sensors:
imu0andimu1Unit box model:
unit_box
The multiSensorPluginTest.world is located in /home/user/src/GazeboPlugin/world folder. This world file includes the Gazebo plugin for co-simulation with Simulink using the following lines in its .xml body:
<plugin name="GazeboPlugin" filename="lib/libGazeboCoSimPlugin.so"><portNumber>14581</portNumber></plugin>
The filename field must be pointing to the location of the compiled Gazebo plugin. This path can be relative to the location Gazebo itself is launched, or you could add it to the Gazebo plugin search path by running:
export GAZEBO_PLUGIN_PATH=${GAZEBO_PLUGIN_PATH}:/home/user/src/GazeboPlugin/export
Configure Gazebo Co-Simulation
Open the performCoSimulationWithGazebo model, which demonstrates how to receive sensor data from these simulated sensors and how to actuate the unit box model from Simulink.
open_system("performCoSimulationWithGazebo")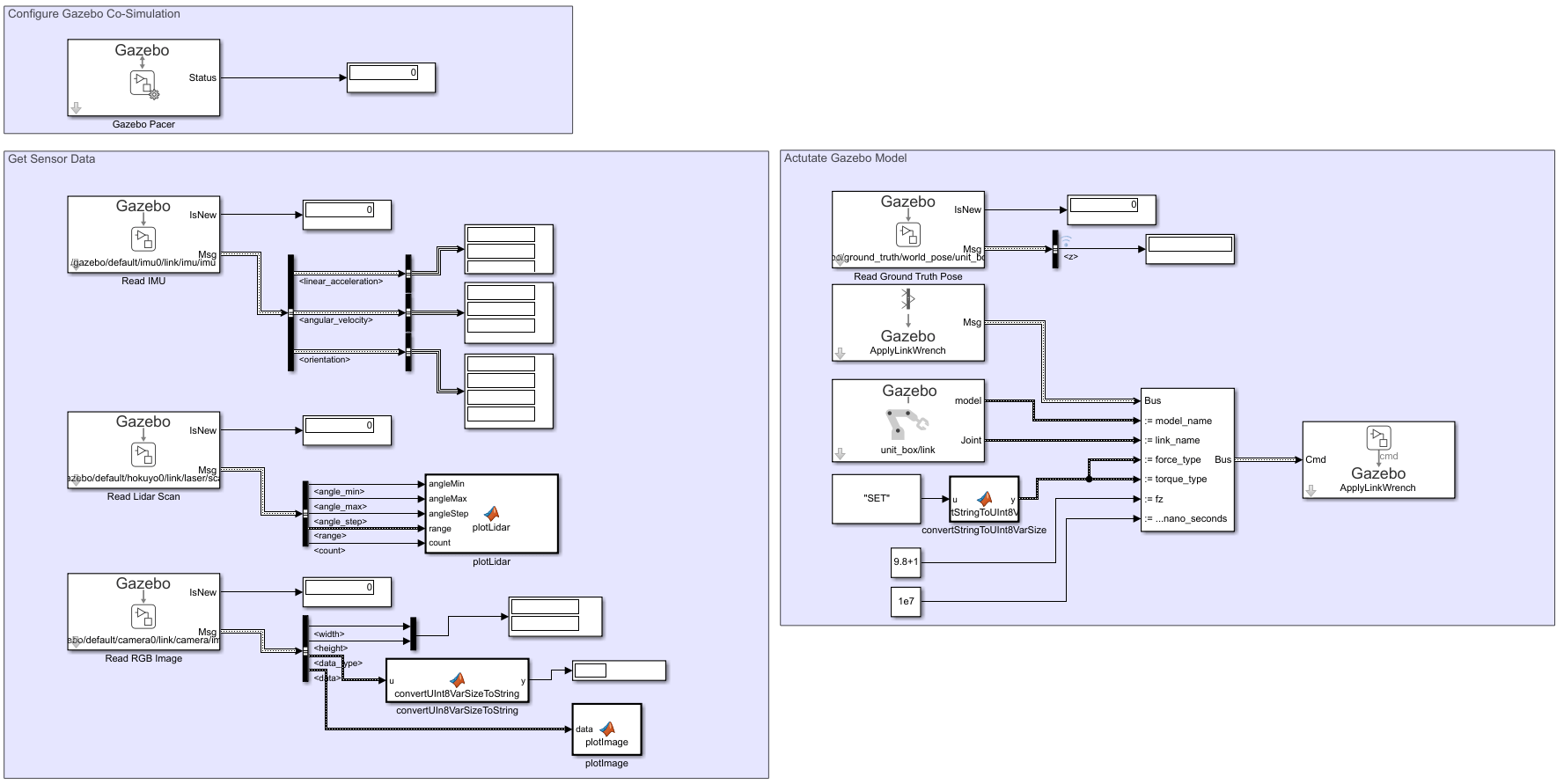
Before simulating the model, configure Gazebo Co-Simulation using Gazebo Pacer block:
hilite_system('performCoSimulationWithGazebo/Gazebo Pacer')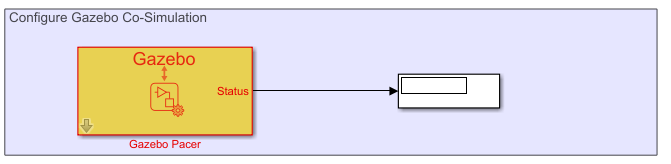
Open the block and click the Configure Gazebo network and simulation settings link.
open_system('performCoSimulationWithGazebo/Gazebo Pacer') In the Network Address drop down, select Custom. Enter the IP address of your Linux machine. The default Port for Gazebo is 14581. Set Response timeout to 10 seconds.
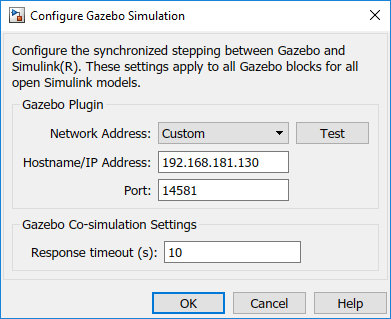
Click the Test button to test the connection to the running Gazebo simulator.
Get Sensor Data
Use the Gazebo Read block to obtain data on specific topics from three sensors:
IMU,
/gazebo/default/imu0/link/imu/imuLidar Scan,
/gazebo/default/hokuyo0/link/laser/scanRGB camera,
/gazebo/default/camera0/link/camera/image
Display the IMU readings and visualize the Lidar Scan and RGB Image using MATLAB® function blocks.

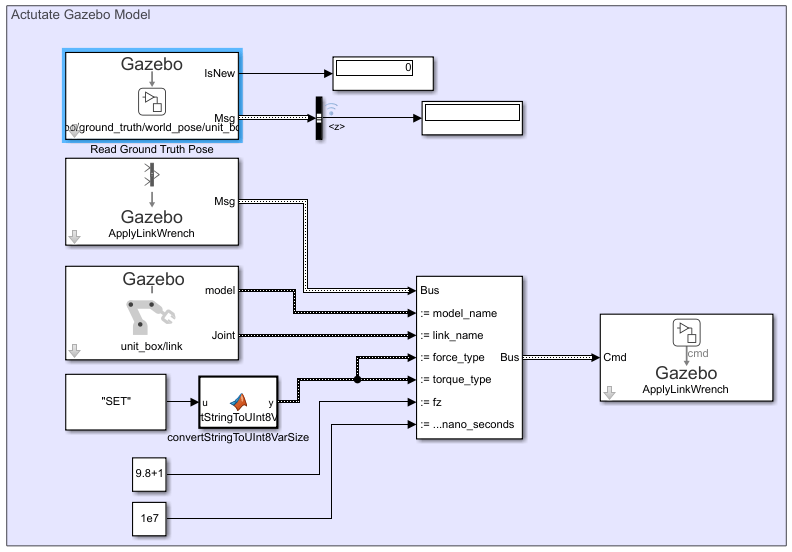
Actuate Gazebo Model
Use the Gazebo Apply Command block to apply a constant force in the z-direction to the unit box that results in an acceleration of 1 . Create a blank ApplyLinkWrench message using Gazebo Blank Message. Specify elements of the message to apply the force to the unit_box/link entity using the Bus Assignment block. Use Gazebo Read to output the ground truth pose of the box. The displacement of the box over a 1 second period should be close to 0.5 meters.
Perform Co-Simulation
To start co-simulation,click Run. You can also step the simulation using Step Forward. Step Back is not supported during co-simulation.
While the simulation is running, notice that Gazebo simulator and Simulink time are synchronized.
This model visualizes the Gazebo sensor data using MATLAB function block and MATLAB plotting functionalities. Here is a snapshot of the image data obtained from Gazebo camera:

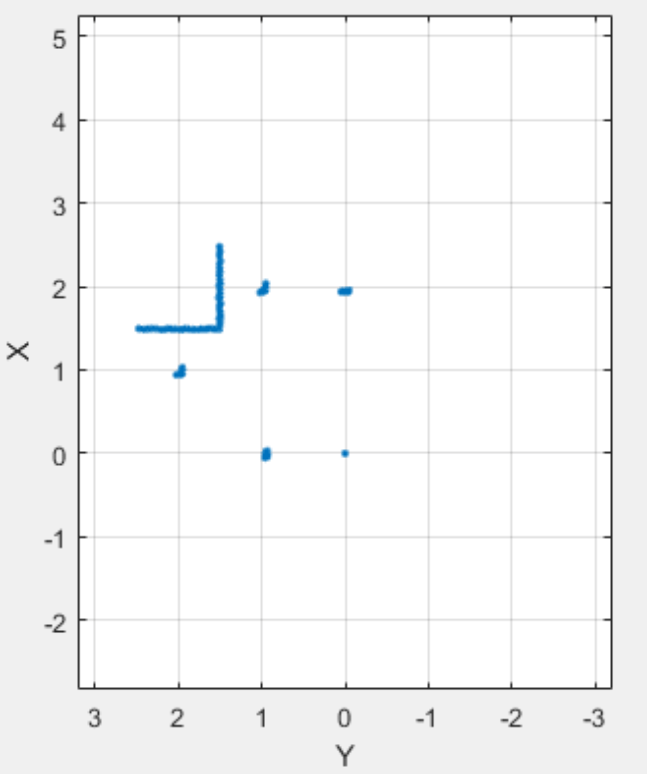
Here is a snapshot of the lidar scan image:
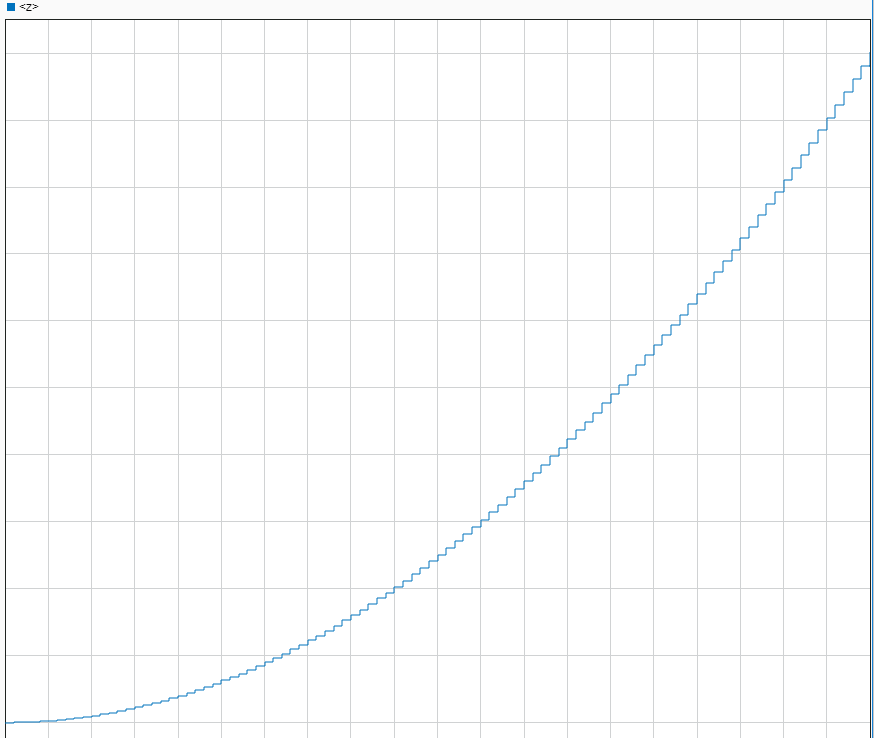
The time-plot of the position of the unit box block in z-direction can be viewed using Data Inspector. The block tracks a parabolic shape due to the constant acceleration over time.
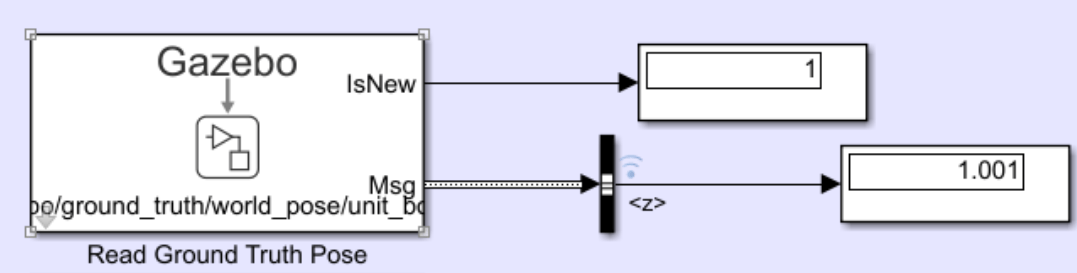
The position of the unit box at the end of simulation is 1.001, leading to a 0.5001 displacement, which is slightly different from the expected value of 0.5. This is due to the error of the Gazebo physics engine. Make the max step size in the Gazebo physics engine smaller to reduce this error.
Time Synchronization
During co-simulation, you can pause Simulink and the Gazebo Simulator at any time using Pause
Note: Gazebo pauses one time step ahead of the simulation.
![]()
![]()
This is due to the following co-simulation time sequence:

Sensor data and actuation commands are exchanged at the correct time step. The execution chooses to step Gazebo first, then Simulink. The simulation execution is still on the t+1, Simulink just stays on the previous step time until you resume the model.