diskmarginplot
Visualize disk-based stability margins
Syntax
Description
Margins as a Function of Frequency
diskmarginplot( plots the disk-based gain
and phase margins for the SISO or MIMO negative feedback loop
L)feedback(L,eye(N)), where N is the number of
inputs and outputs in the open-loop response L.
For MIMO responses, diskmarginplot plots the multiloop disk
margins. The disk-based gain margin at each frequency is ±GM, where
GM is the value shown in the plot in dB. Similarly, the disk-based
phase margin is ±PM degrees, where PM is the value
shown on the plot. For details about disk-based gain and phase margins, see diskmargin.
diskmarginplot(___, plots
the disk-based gain and phase margins computed using the skew sigma)sigma
to bias the gain variation toward gain increase (sigma > 0) or gain
decrease (sigma < 0). If you have used
diskmargin to obtain disk-based margins with some particular
sigma, you can use this syntax to see the frequency dependence of
the margins at that sigma value. For sigma ≠ 0,
the plotted value is GM = min(gmax,1/max(0,gmin)). In other words, the
plot shows the largest amount of gain change [1/GM,GM] that fits within
the disk-based gain margin [gmin,gmax] of the system at the specified
sigma.
diskmarginplot(___, plots the
margins at the frequencies specified by w)w.
If
wis a cell array of the form{wmin,wmax}, then the plot shows the margins at frequencies ranging betweenwminandwmax.If
wis a vector of frequencies, then the plot shows the margins at each specified frequency.
Range of Gain and Phase Variations
diskmarginplot( plots the range of
simultaneous gain and phase variations corresponding to a disk-based gain margin. The plot
also shows the maximum gain-only and phase-only variations (this disk-based gain and phase
margins). DGM)DGM is a vector of the form [gmin,gmax].
The gain margin DGM can also be a scalar, which is equivalent to
specifying the symmetric gain variation [1/DGM,DGM]. To plot the ranges
for multiple disk-based gain margins at once, use a two-column matrix of the form
[gmin1,gmax1;...;gminN,gmaxN]. For more information about disk-based
gain margins, see diskmargin.
diskmarginplot( plots the
complex-valued disk of modeled gain and phase variations corresponding to the disk-based
gain margin DGM,'disk')DGM. For details about how disk-margin analysis models
gain and phase variations, see Stability Analysis Using Disk Margins.
diskmarginplot( plots the
exclusion region in the Nyquist plane corresponding to the disk margin
DGM,'nyquist')DGM. The requirement that the closed-loop system remain stable for
gain or phase variations within the disk corresponding to DGM amounts
to a requirement that the open-loop response remain outside a disk-shaped exclusion region
in the Nyquist plane. For more information, see Stability Analysis Using Disk Margins.
diskmarginplot(
plots the range of gain and phase variations corresponding to the disk size
alpha,sigma,___)alpha and skew sigma. If either
alpha or sigma is a vector, then the plot
includes the ranges for all specified values. If both alpha and
sigma are vectors, then the plot includes the ranges for the pairs
alpha1,sigma1;...;alphaN,sigmaN.
To plot the modeled uncertainty disk corresponding to
alpha,sigma, use this syntax with the
'disk' flag. To plot the corresponding exclusion disk in the Nyquist
plane, use this syntax with the 'nyquist' flag.
Plot on Specified Axes
diskmarginplot( draws a
plot on the axes specified by an axes handle (AX,___)axes or a
UIaxes object). Use this argument to specify axes when creating apps in
Develop Apps Using App Designer. You can use this argument with any of the
previous syntaxes to draw any of the plots that diskmarginplot can
generate.
Examples
Plot the disk-based gain and phase margins of a system with open loop response L and closed-loop response feedback(L,1).
L = tf(25,[1 10 10 10]); diskmarginplot(L)
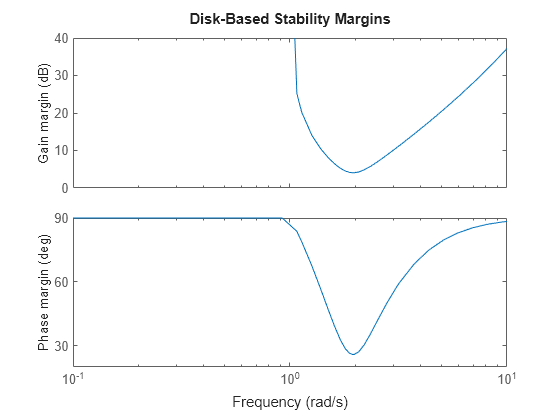
The disk-based gain margin at each frequency is at least ±GM, where GM is the value shown in the plot in dB. Similarly, the disk-based phase margin is ±PM degrees. The disk-based margins returned by the diskmargin command are the smallest margins over frequency. (Right-click on the plot and select Characteristics > Minimum Disk Margin for a data tip containing information about these minimum margins.)
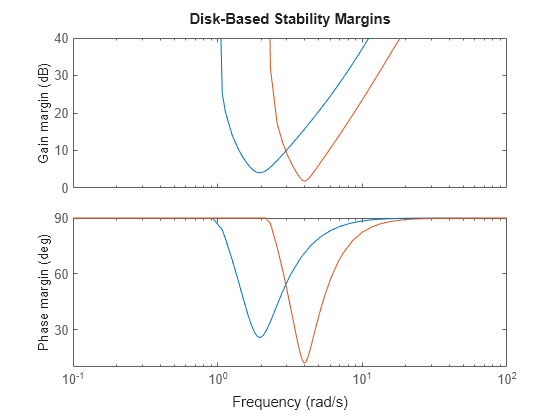
Compare the disk-based gain and phase margins of two open-loop responses on the same plot.
L1 = tf(25,[1 10 10 10]); L2 = tf([1 100],[1 10 20 50]); diskmarginplot(L1,L2)
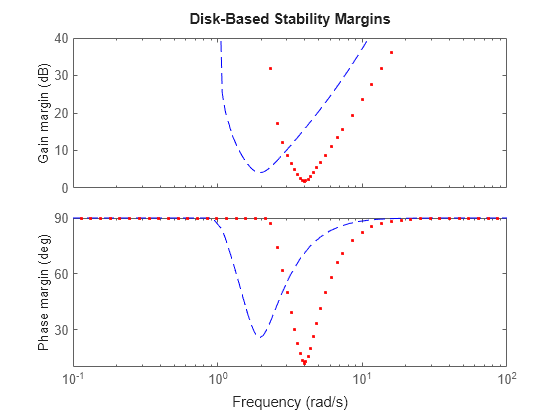
You can customize the appearance of the plots using the LineSpec argument. Plot the margins again, using a blue dashed line for L1 and red dots for L2.
diskmarginplot(L1,'b--',L2,'r.')
The disk-based gain margins returned by diskmargin assume no phase variation, and the phase margins assume no gain variation. In practice, systems experience both gain and phase variation at the same time. Disk-margin analysis accounts for such simultaneous gain and phase variation.
Compute the disk-based gain and phase margins of a system. Then, use diskmarginplot to visualize the corresponding allowed ranges of simultaneous gain and phase variation.
L = tf(25,[1 10 10 10]); DM = diskmargin(L); DGM = DM.GainMargin
DGM = 1×2
0.6273 1.5942
DPM = DM.PhaseMargin
DPM = 1×2
-25.8017 25.8017
diskmarginplot(DGM)
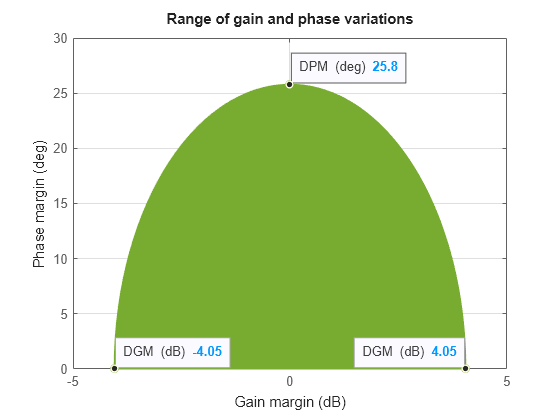
The shaded region in the plot shows the range of simultaneous gain and phase variations that preserve the stability of the closed-loop system feedback(L,1). When there is no phase variation, the system can tolerate the full gain-variation range DGM, from –4 dB to 4 dB. If the phase is allowed to vary by about ±20 degrees, the allowable gain-variation range drops to about –2.5 dB to 2 dB. At the full phase-variation range of ±26 degrees, the system can tolerate no gain variation.
To visualize multiple ranges on the same plot, combine them into a two-column vector. For instance, compute the disk margins of L with positive and negative skew and plot all three ranges of variation together.
DMn = diskmargin(L,-2); DGMn = DMn.GainMargin; DMp = diskmargin(L,2); DGMp = DMp.GainMargin; DGMall = [DGMn;DGM;DGMp]; diskmarginplot(DGMall)

This plot shows that the feedback loop can tolerate larger gain and phase variations when the gain decreases. In other words, the loop stability is more sensitive to gain increase. For more information about how varying skew affects disk-based gain and phase margin estimates, see Stability Analysis Using Disk Margins.
Disk-based gain-margin analysis models gain and phase variation as an uncertain factor F, multiplying an open-loop gain L. (For details of this model, see Stability Analysis Using Disk Margins.) The stable range of gain and phase variations returned by the diskmargin command is equivalent to a disk of F values for which the closed loop is stable. When you obtain the disk-based gain and phase margins of a system, you can use diskmarginplot to visualize the corresponding disk of F values.
L = tf(25,[1 10 10 10]); DM = diskmargin(L); DGM = DM.GainMargin
DGM = 1×2
0.6273 1.5942
diskmarginplot(DGM,'disk')
The plot shows the values of F in the complex plane, where the x-axis is the real part and the y-axis is the imaginary part. The disk-based gain margin DGM uniquely determines this disk and the corresponding disk-based phase margin, DPM.
The uncertainty disk F is parameterized by two values: α, which sets the size of the disk, and σ, which biases the gain variation toward gain increase or decrease. This parameterization is given by:
,
where δ is a normalized uncertainty. (For details, see Stability Analysis Using Disk Margins.) For a given range of gain variation, you can use gm2dm to convert the disk-based gain margin DGM to the α and σ values that describe the corresponding disk. diskmarginplot can plot the F disk for a given α,σ pair.
DGM = [0.8,2]
DGM = 1×2
0.8000 2.0000
[alpha,sigma] = gm2dm(DGM);
diskmarginplot(alpha,sigma,'disk')
In this case, σ is greater than zero because the disk-based gain range DGM = [0.8,2] includes more gain increase than decrease. σ = 0 represents a gain that can increase as much as it can decrease. σ < 0 represents a range with more decrease than increase. Plot the F disk for different values of σ to see how the gain range (the diameter of the disk) varies with σ.
sigma = [-3,0,3];
diskmarginplot(alpha,sigma,'disk')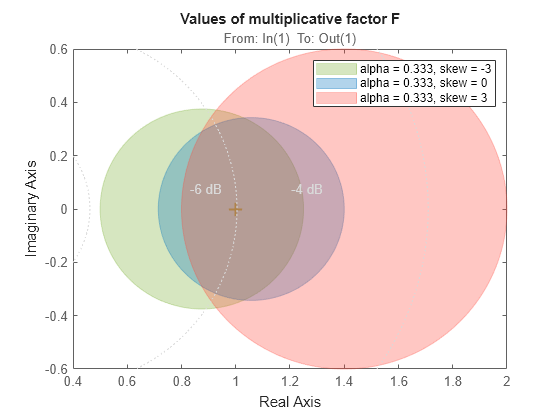
For a fixed σ, α controls the size of the disk, and hence the amount of modeled uncertainty. Plot the disk for several values of α at σ = 0.
sigma = 0;
alpha = [0.1,0.333,0.5];
diskmarginplot(alpha,sigma,'disk')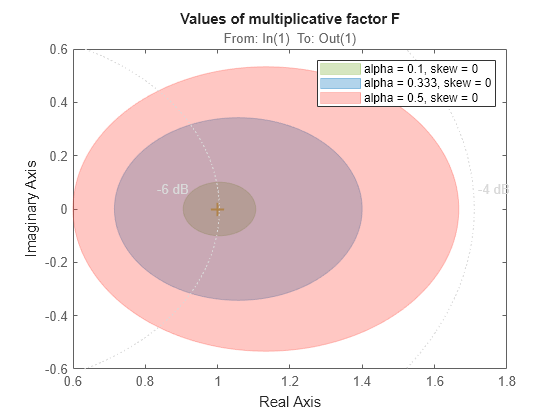
As described in Stability Analysis Using Disk Margins, for a given σ, the largest uncertainty disk F for which the closed-loop system feedback(L*F,1) remains stable can be interpreted as an exclusion region that the Nyquist curve of L cannot enter. For any value of σ, the exclusion disk contains the critical point (–1,0) and is tangent to the Nyquist curve. The skew adjusts the size and position of the tangent disks. You can use diskmarginplot to visualize these exclusion disks and superimpose them on the Nyquist curve of L.
Compute disk-based gain margins for a system using three different skew values, one corresponding to more gain increase than decrease (σ > 0), one corresponding to more gain decrease than increase (σ < 0), and one balanced (σ = 0).
L = tf(25,[1 10 10 10]); DMdec = diskmargin(L,-2); DGMdec = DMdec.GainMargin; DM = diskmargin(L,0); DGM = DM.GainMargin; DMinc = diskmargin(L,2); DGMinc= DMinc.GainMargin;
To view the corresponding exclusion regions, plot the Nyquist plots of L and hold the figure. Then use diskmarginplot with the 'nyquist' flag to add the exclusion regions to the plot.
nyquist(L) hold on diskmarginplot([DGMdec;DGM;DGMinc],'nyquist') hold off
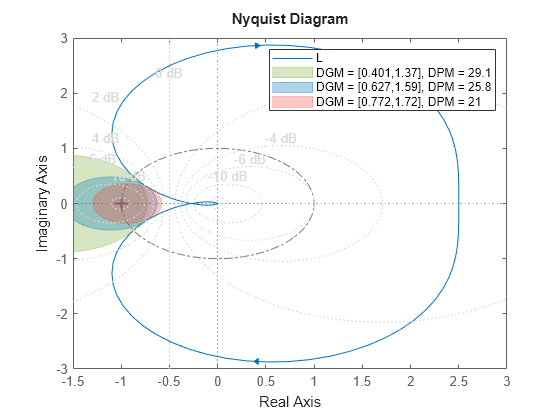
As σ increases from –2 to 2, the disks move to the right, and each disk provides lower estimates of the classical gain and phase margins.
Plot the disk margins as a function of frequency of a system with the following open-loop response.
L = tf(25,[1 10 10 10]);
For the plot, specify the following attributes:
Frequency units: Hz
Gain margins on a log scale, in absolute units
Grid on
opts = diskmarginoptions; opts.FreqUnits = 'Hz'; opts.MagScale = 'log'; opts.MagUnits = 'abs'; opts.grid = 'on'; diskmarginplot(L,opts)

Input Arguments
Open-loop response, specified as a dynamic system model. L can
be SISO or MIMO, as long as it has the same number of inputs and outputs.
diskmarginplot plots the disk-based gain and phase margins for
the negative-feedback closed-loop system feedback(L,eye(N)).
To plot the margins of the positive feedback system
feedback(L,eye(N),+1), use
diskmargin(-L).
If L is an uncertain state-space model
(uss or genss with uncertain blocks), then
diskmarginplot plots the margins of random samples of
L. To visualize the worst-case stability margins of an uncertain
system, use wcdiskmarginplot.
If L is a frequency-response data model (such as
frd), then diskmarginplot plots the margins
at each frequency represented in the model.
If L is a model array, then diskmarginplot
plots the margins for all models in the array on the same axis and in the same line
style.
Skew of uncertainty region used to compute the stability margins, specified as a
real scalar or vector (for diskmarginplot(alpha,sigma) plots only).
This parameter biases the uncertainty used to model gain and phase variations toward gain increase or gain decrease.
The default
sigma= 0 uses a balanced model of gain variation in a range[gmin,gmax], withgmin = 1/gmax.Positive
sigmauses a model with more gain increase than decrease (gmin > 1/gmax).Negative
sigmauses a model with more gain decrease than increase (gmin < 1/gmax).
For more detailed information about how the choice of sigma
affects the margin computation, see Stability Analysis Using Disk Margins.
Skew in diskmargin(L,sigma) Syntax
When plotting the gain margins of a dynamic system versus frequency, use the
default sigma = 0 to get unbiased estimates of gain and phase
margins. For sigma = 0, the disk-based gain margin at each
frequency is ±GM, where GM is the value shown in
the plot in dB.
If you have used diskmargin to obtain disk-based margins with
some particular sigma, you can use this syntax to see the
frequency dependence of the margins at that sigma value. For
sigma ≠ 0, the plotted value is GM =
min(gmax,1/max(0,gmin)). In other words, the plot shows the largest amount
of gain change [1/GM,GM] that fits within the disk-based gain
margin [gmin,gmax] of the system at the specified
sigma.
For the syntax diskmarginplot(L,sigma), the skew
sigma must be a scalar.
Skew in diskmargin(alpha,sigma) Syntax
In the syntax diskmargin(alpha,sigma), the function plots the
uncertainty disk parameterized by the values alpha and
sigma (see Stability Analysis Using Disk Margins). To convert
between disk-based gain margins and alpha,
sigma parameterization, use dm2gm and
gm2dm.
For this syntax, diskmarginplot enforces the relation
alpha*abs(1+sigma) < 2.
For this syntax, the skew sigma can be a vector, allowing you
to compare multiple disks on the same plot. If alpha is a scalar
and sigma is a vector, then the plot shows the disks
corresponding to the pairs alpha,sigma_k for each entry in
sigma. If both alpha and
sigma are vectors, then the plot shows the disks for the pairs
alpha1,sigma1;...;alphaN,sigmaN.
Frequencies at which to plot stability margins, specified as the cell array {wmin,wmax} or as a vector of frequency values.
If
wis a cell array of the form{wmin,wmax}, then the plot shows the margins at frequencies betweenwminandwmax.If
wis a vector of frequencies, then the plot shows the margins at each specified frequency. For example, uselogspaceto generate a row vector with logarithmically spaced frequency values.
Specify frequencies in units of rad/TimeUnit, where TimeUnit is the TimeUnit property of L.
Plot options, specified as a diskmarginplot options set that you
create with diskmarginoptions. Elements that you can customize include plot title,
axes labels, and grids.
Disk-based gain margin, specified as a scalar, a two-element vector of the form
[gmin,gmax], or a two-column matrix of the form
[gmin1,gmax1; ...; gminN,gmaxN].
Use a two-element vector, DGM = [gmin,gmax]
to plot the allowable range of simultaneous gain and phase variations corresponding to
the disk-based gain margin [gmin,gmax]. You can obtain
[gmin,gmax] in the GainMargin field of the
output structures of the diskmargin command. You can also obtain
[gmin,gmax] from classical gain and phase margins using getDGM.
Using a scalar DGM is equivalent to specifying the symmetric
gain margin [1/DGM,DGM].
To show the ranges of several disk-based gain margins on the same plot, use
DGM = [gmin1,gmax1;...;gminN,gmaxN]. For
symmetric gain margins of the form [1/gmax,gmax], you can use a
column vector of the form [gmax1;gmax2;...;gmaxN].
Size of modeled gain and phase variation, specified as a scalar or vector.
Disk-based gain-margin analysis models gain and phase variation as a multiplicative
uncertainty F, which is a disk of values containing F = 1,
corresponding to the nominal value of the system. The disk is parameterized by
alpha, which sets the size of the disk, and
sigma, which biases the gain variation toward gain increase or
decrease. (For details of this model, see Stability Analysis Using Disk Margins.)
diskmarginplot lets you plot the disk F or
the region of gain and phase variations represented by particular
alpha,sigma pairs. For the syntax
diskmarginplot(alpha,sigma), the disk size
alpha can be a vector. If alpha is a vector
and sigma is a scalar, then the plot shows the regions
corresponding to the pairs alpha_k,sigma for each entry in
alpha. If both alpha and
sigma are vectors, then the plot shows the regions for the pairs
alpha1,sigma1;...;alphaN,sigmaN.
diskmarginplot enforces the relation
alpha*abs(1+sigma) < 2. To convert between disk-based
gain margins and alpha, sigma
parameterization, use dm2gm and
gm2dm.
Axes handle, specified as an axes object or a
UIaxes object. Use this argument to specify axes when creating apps
in Develop Apps Using App Designer.
References
[1] Seiler, Peter, Andrew Packard, and Pascal Gahinet. “An Introduction to Disk Margins [Lecture Notes].” IEEE Control Systems Magazine 40, no. 5 (October 2020): 78–95.
Version History
Introduced in R2020a
See Also
getDGM | wcdiskmarginplot | diskmargin | diskmarginoptions | gm2dm | umargin