balancmr
(Not recommended) Balanced model truncation via square root method
balancmr is not recommended. Use
reducespec
instead. (since R2023b) For more information on updating your code, see Version History.
Syntax
GRED = balancmr(G) GRED = balancmr(G,order) [GRED,redinfo] = balancmr(G,key1,value1,...) [GRED,redinfo] = balancmr(G,order,key1,value1,...)
Description
balancmr returns a reduced order model
GRED of G and a struct array
redinfo containing the error bound of the reduced model and Hankel
singular values of the original system.
The error bound is computed based on Hankel singular values of G. For a stable system these values
indicate the respective state energy of the system. Hence, reduced order can be directly
determined by examining the system Hankel singular values,
σι.
With only one input argument G, the function will show a Hankel
singular value plot of the original model and prompt for model order number to reduce.
This method guarantees an error bound on the infinity norm of the additive error ∥ G-GRED ∥ ∞ for
well-conditioned model reduced problems [1]:
This table describes input arguments for balancmr.
Argument | Description |
|---|---|
G | LTI model to be reduced. Without any other inputs,
|
ORDER | (Optional) Integer for the desired order of the reduced model, or optionally a vector packed with desired orders for batch runs |
A batch run of a serial of different reduced order models can be generated by specifying
order = x:y, or a vector of positive integers. By default, all the
anti-stable part of a system is kept, because from control stability point of view, getting
rid of unstable state(s) is dangerous to model a system.
'MaxError' can be specified in the same fashion as an
alternative for 'Order'. In this
case, reduced order will be determined when the sum of the tails of the Hankel singular values
reaches the 'MaxError'.
This table lists the input arguments 'key' and its
'value'.
Argument | Value | Description |
|---|---|---|
| Real number or vector of different errors | Reduce to achieve H∞
error. When present,
|
|
| Optional 1-by-2 cell array of LTI weights You can use weighting functions to make the model reduction algorithm focus on frequency bands of interest. As an alternative, you
can use Default weights are both identity. |
|
| Display Hankel singular plots (default
|
| Integer, vector or cell array | Order of reduced model. Use only if not specified as 2nd argument. |
This table describes output arguments.
Argument | Description |
|---|---|
GRED | LTI reduced order model. Becomes multidimensional array when input is a serial of different model order array |
REDINFO | A STRUCT array with three fields:
|
G can be stable or unstable, continuous or discrete.
Examples
If you do not specify any target order for the reduced model,
balancmr displays the Hankel singular values of the model and
prompts you to choose a reduced-model order.
For this example, use a random 30th-order state-space model.
rng(1234,'twister'); % fix random seed for example repeatability G = rss(30,5,4); G1 = balancmr(G)
Please enter the desired order: (>=0)
Examine the Hankel singular value plot.
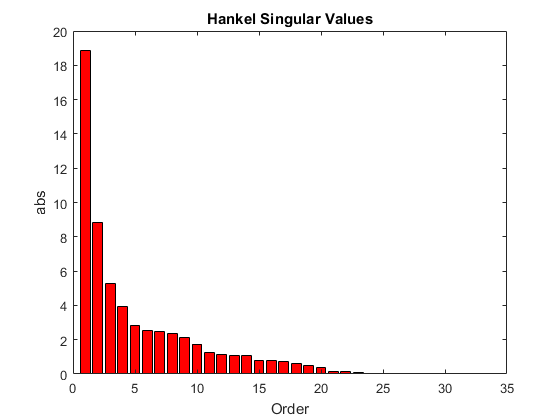
The plot shows that most of the energy of the system can be captured in a 20th-order
approximation. In the command window, enter 20. balancmr returns
G1.
Examine the response of the original and reduced models.
sigma(G,G1)
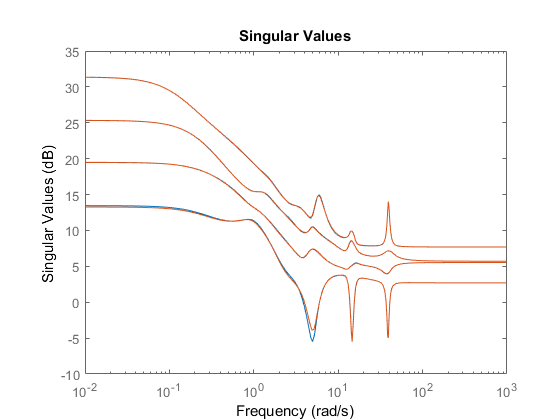
The 20th-order approximation matches the dynamics of the original 30th-order model fairly well.
Algorithms
Given a state space (A,B,C,D) of a system and k, the desired reduced order, the following steps will produce a similarity transformation to truncate the original state-space system to the kth order reduced model.
Find the SVD of the controllability and observability Gramians
P = Up Σp VpT
Q = UqΣq VqT
Find the square root of the Gramians (left/right eigenvectors)
Lp = Up Σp½
Lo = Uq Σq½
Find the SVD of (LoTLp)
LoT Lp = U Σ VT
Then the left and right transformation for the final kth order reduced model is
SL,BIG = Lo U(:,1:k) Σ(1;k,1:k))–½
SR,BIG = Lp V(:,1:k) Σ(1;k,1:k))–½
Finally,
The proof of the square root balance truncation algorithm can be found in [2].
References
[1] Glover, K., “All Optimal Hankel Norm Approximation of Linear Multivariable Systems, and Their Lµ-error Bounds,“ Int. J. Control, Vol. 39, No. 6, 1984, p. 1145-1193
[2] Safonov, M.G., and R.Y. Chiang, “A Schur Method for Balanced Model Reduction,” IEEE Trans. on Automat. Contr., Vol. 34, No. 7, July 1989, p. 729-733