reducespec
Description
The reducespec function is the entry point for model order
reduction workflows in Control System Toolbox™ and Robust Control Toolbox™ software. Use this function to create a model order reduction (MOR) task based
on the model type and selected method.
For information on configuring model order reduction tasks, see the object corresponding
to your model type and selected algorithm. For details on how to select orders and obtain
reduced-order models, see the corresponding view and
getrom functions.
| Algorithm | Supported Models | Objects | Object Functions |
|---|---|---|---|
| Balanced truncation | Nonsparse and sparse LTI models | ||
| Balanced truncation of normalized coprime factors (NCF) | Nonsparse LTI models | NCFBalancedTruncation | |
| Modal truncation | Nonsparse and sparse LTI models | ||
| Proper orthogonal decomposition (since R2024b) | Nonsparse and sparse LTI models | ProperOrthogonalDecomposition | |
| Frequency response fitting (since R2025a) | Sparse LTI models | FrequencyResponseFitting | |
| Zero-pole truncation (since R2025a) | Sparse LTI models | SparseZeroPoleTruncation |
This function creates only the MOR specification object and does not perform any computation. This allows you to properly configure options before you run the MOR algorithm, which can be computationally expensive in the case of sparse models.
Tip
For the full workflow, see Task-Based Model Order Reduction Workflow.
R = reducespec(sys,method)sys. method is the
model order reduction algorithm, specified as one of the following:
"balanced""ncf"(Requires Robust Control Toolbox software)"modal""pod"(since R2024b)"frfit"(since R2025a)"zpk"(since R2025a)
Examples
This example shows the basic workflow for obtaining reduced-order models using the task-based model order reduction workflow.
Generate a random discrete-time state-space model with 40 states.
rng(0) sys = drss(40);
Create a balanced truncation model-order reduction task using reducespec.
R = reducespec(sys,"balanced");The function returns a BalancedTruncation object.
View the graphical information to help decide the reduced order using the view function.
view(R)
For balanced truncation, view plots the state contributions in terms of the Hankel singular values.
Obtain the reduced order model using getrom. For this example, select an order 15.
rsys = getrom(R,Order=15);
Compare the Bode response of both models.
bode(sys,rsys,'r--')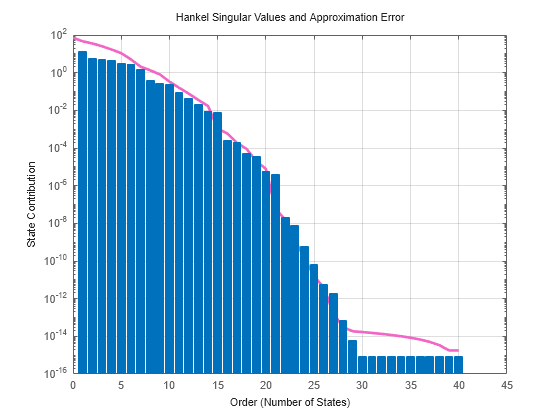
legend("Original","Order 15")

Input Arguments
Output Arguments
Limitations
Modal Truncation
Sparse modal truncation in discrete-time is only applicable if A+E is definite.
Performs poorly when DC contributions of modes have varying signs and cancellations occur (extreme case is models with zero DC gain). Modal approximation will then tend to have much higher DC gain, which is not acceptable.
Performs poorly for models whose dynamics are packed in a narrow band. Discarded modes must be reasonably separated from retained modes.
Proper Orthogonal Decomposition
POD method is applicable only to stable LTI models.
The Galerkin algorithm is recommended specifically for symmetric positive definite problems with A = AT, E = ET ≥ 0 or M = MT ≥ 0, C = CT, K = KT. The algorithm may perform poorly for asymmetric problems because it only takes into account the input-to-state map.
Tips
Use
findopto compute matching steady-state initial conditions for the reduced-order model.
References
[1] Benner, Peter, Jing-Rebecca Li, and Thilo Penzl. “Numerical Solution of Large-Scale Lyapunov Equations, Riccati Equations, and Linear-Quadratic Optimal Control Problems.” Numerical Linear Algebra with Applications 15, no. 9 (November 2008): 755–77. https://doi.org/10.1002/nla.622.
[2] Benner, Peter, Martin Köhler, and Jens Saak. “Matrix Equations, Sparse Solvers: M-M.E.S.S.-2.0.1—Philosophy, Features, and Application for (Parametric) Model Order Reduction.” In Model Reduction of Complex Dynamical Systems, edited by Peter Benner, Tobias Breiten, Heike Faßbender, Michael Hinze, Tatjana Stykel, and Ralf Zimmermann, 171:369–92. Cham: Springer International Publishing, 2021. https://doi.org/10.1007/978-3-030-72983-7_18.
[3] Varga, A. “Balancing Free Square-Root Algorithm for Computing Singular Perturbation Approximations.” In [1991] Proceedings of the 30th IEEE Conference on Decision and Control, 1062–65. Brighton, UK: IEEE, 1991. https://doi.org/10.1109/CDC.1991.261486.
[4] Green, M. “A Relative Error Bound for Balanced Stochastic Truncation.” IEEE Transactions on Automatic Control 33, no. 10 (October 1988): 961–65. https://doi.org/10.1109/9.7255.