Get Transform
Libraries:
ROS Toolbox /
ROS
Description
The Get Transform block reads the transformation value between the
specified source and target coordinate frames from the ROS network. Use this block when
transformations between different frames are published by nodes on the ROS network. On each
simulation step, the block checks whether a transformation is available between the specified
frames. If it is available, the block outputs the outputs a
geometry_msgs/TransformStamped non-virtual bus or a homogeneous
transformation matrix as a 4-by-4 double
matrix.
You can use the output transformation value to transform the points in source frame to
target frame using the pre-multiply convention. The block can access all frames with dynamic
transformations under tf topic on the ROS Network.
Examples
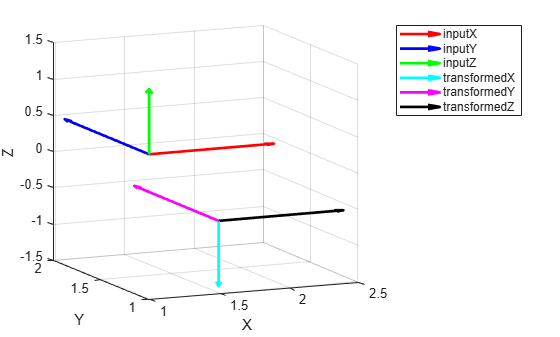
Read and Apply Transformation to ROS Message in Simulink
Read transformations from a ROS network and use them to transform a pose message using Simulink®.
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2023b