readCartesian
(To be removed) Read laser scan ranges in Cartesian coordinates
readCartesian will be removed in a future release. Use rosReadCartesian instead. For more information, see ROS Message Structure Functions.
Syntax
Description
cart = readCartesian(scan)scan, into Cartesian coordinates,
cart. This function uses the metadata in the message,
such as angular resolution and opening angle of the laser scanner, to perform
the conversion. Invalid range readings, usually represented as
NaN, are ignored in this conversion.
Examples
Connect to ROS network. Subscribe to a laser scan topic, and receive a message.
rosinit('192.168.17.129')Initializing global node /matlab_global_node_40737 with NodeURI http://192.168.17.1:56343/
sub = rossubscriber('/scan');
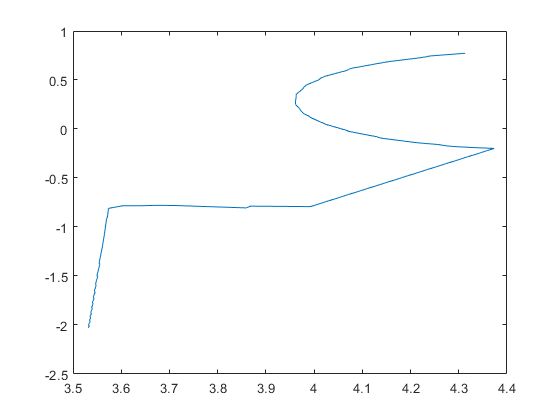
scan = receive(sub);Read the Cartesian points from the laser scan. Plot the laser scan.
cart = readCartesian(scan); plot(cart(:,1),cart(:,2))
Shutdown ROS network.
rosshutdown
Shutting down global node /matlab_global_node_40737 with NodeURI http://192.168.17.1:56343/
Connect to ROS network. Subscribe to a laser scan topic, and receive a message.
rosinit('192.168.17.129')Initializing global node /matlab_global_node_12735 with NodeURI http://192.168.17.1:56572/
sub = rossubscriber('/scan');
scan = receive(sub);Read the Cartesian points from the laser scan with specified range limits. Plot the laser scan.
cart = readCartesian(scan,'RangeLimit',[0.5 6]);
plot(cart(:,1),cart(:,2))
Shutdown ROS network.
rosshutdown
Shutting down global node /matlab_global_node_12735 with NodeURI http://192.168.17.1:56572/