ROS 2 Network Analyzer
Visualize and analyze nodes, topics, services, and actions interaction in ROS 2 network
Since R2024b
Description
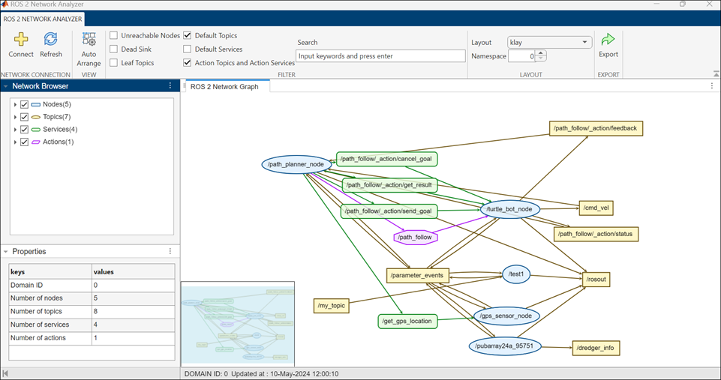
The ROS 2 Network Analyzer enables you to visualize a comprehensive overview of the ROS 2 network and analyze essential information about all the elements in the network graph such as node name, information about the message between the nodes, and interaction between the parameters associated with the ROS 2 nodes such as topics, services and actions.
This image provides a view of the app toolstrip.
To use this app:
Open ROS 2 Network Analyzer app from the Apps tab in MATLAB® toolstrip.
Click Connect
 from MATLAB toolstrip to connect to a ROS 2 network.
from MATLAB toolstrip to connect to a ROS 2 network.Provide ROS 2 Domain ID and click Submit. The default domain ID is 0. This opens the network graph in the visualizer.
View the list of different elements in the Network Browser panel and their numbers in the Properties panel along with the Domain ID of the connected ROS 2 network. Select or clear any of these elements from the Network Browser to view or hide them from the graph.
Network Browser Properties 
Nodes — Lists all nodes in the connected ROS 2 network
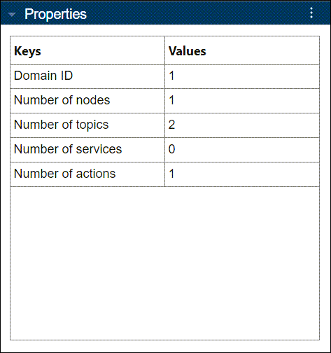

Topics — Lists all topics published and subscribed by each node in the connected ROS 2 network

Services — Lists all services that a node provides (service-server) and for which a node is a client (service-client)

Actions — Lists all actions that a node provides (action-server) and for which a node is a client (action-client)
Utilize the Advanced Filters option to efficiently filter nodes, topics, services, and actions associated with selected entities in the Network Browser for a loaded ROS 2 network, without the need to input their complete names. You can also filter based upon message, service and action interface types.
You can further filter down the network to your requirements by entering any of these expressions in the Search tab:
Keyword — Include entities that contain specific words, such as camera or GPS.
Regular Expression — Match entities using patterns like
.*camera.*orgps.*for flexible searching.Exclude — Use ~ before a keyword to exclude entities, like
~debugand~camera.Multiple Inputs — Enter multiple filters by separating them with commas.
Click Clear Filters in the network canvas to remove all the advanced filters and reload the default graph.
You can also add values to the Network Depth option to modify the number of neighboring entities visible for a selected entity in the graph.
Click Refresh
 to update the ROS 2 network graph with newly added or
removed nodes and all the node elements in the Network Browser and
Properties respectively.
to update the ROS 2 network graph with newly added or
removed nodes and all the node elements in the Network Browser and
Properties respectively.You can click and drag any element across the visualization window based on requirements. To bring the network graph back to its initial view, click Auto Arrange
 from the app toolstrip.
from the app toolstrip.Zoom in or zoom out using pinch mechanism or click and hold to pan around the graph based on visual requirements.
Use the mini map at the bottom left corner of the visualization window to get a complete overview of a large network, highlighting the currently visible section. You can click anywhere on the mini map to pan around the network graph, ensuring ease of navigation, and choose to view the section you need.
Select any of the elements in the graph to view all its details in the Properties panel.
Use various search filters to view or hide different elements in the graph.
Arrange the network graph using various layouts based on specific requirements or group the elements based on namespace.
Click Export
 from MATLAB toolstrip to the graph snapshot as an image.
from MATLAB toolstrip to the graph snapshot as an image.
For a walkthrough of the app, play this video.
Open the ROS 2 Network Analyzer App
MATLAB toolstrip: On the Apps tab, under Robotics and Autonomous Systems, click the app icon
 .
.MATLAB command prompt: Enter
ros2NetworkAnalyzer.