ROS Node Generation and Deployment
ROS Toolbox enables you to generate C++ and CUDA® code for ROS nodes, and deploy them to local or remote device targets. For MATLAB® code that contains ROS interfaces, you can generate C++ code and deploy them as ROS nodes using MATLAB Coder™ (See Generate a Standalone ROS Node). For Simulink® models, you can generate C++ code using Simulink Coder (See Generate Standalone ROS Node from Simulink) or optimized CUDA code using GPU Coder™, and deploy them as ROS nodes.
Note
As of May 31, 2025, ROS 1 has reached end of life and is no longer officially supported. Migrating to ROS 2 is recommended to access the latest features and updates. For more information on equivalent ROS Toolbox features supporting node generation and deployment, see ROS 2 Node Generation and Deployment.
Deployment of ROS nodes requires transferring files to the target ROS device through an SSH connection. Ensure that OpenSSH is installed on the target ROS device before deployment.
Functions
Topics
Generate and Deploy ROS Nodes from MATLAB
- MATLAB Programming for Code Generation
Recommended workflow for generating a standalone executable from MATLAB code that contains ROS interfaces. - Generate a Standalone ROS Node
Generate C++ code for a standalone ROS node from a MATLAB function. - Configure MATLAB Coder for ROS Node Generation
Configure MATLAB Coder configuration object for customizing ROS Node generation. - Generate CUDA ROS and CUDA ROS 2 Nodes Using MATLAB Coder and GPU Coder
Generate and build CUDA ROS and CUDA ROS 2 nodes from a MATLAB function.
Generate and Deploy ROS Nodes from Simulink
- Generate Standalone ROS Node from Simulink
Generate and build a standalone ROS node from a Simulink model. - Generate CUDA ROS Node from Simulink
Configure Simulink Coder to generate and build a CUDA ROS node from a Simulink model. - Generate ROS or ROS 2 Packages for Model Reference Hierarchy in Simulink
Model references in Simulink enable modular development and code reuse in large components. - Generate a ROS Control Plugin from Simulink
Generate and build aros_controlplugin from a Simulink model. - Enable External Mode for ROS Toolbox Models
External mode enables Simulink on your host computer to communicate with a deployed model on your robotics hardware during runtime. - Generate Code to Manually Deploy a ROS Node from Simulink
This example shows you how to generate C++ code from a Simulink model to deploy as a standalone ROS node. - Get Started with Robot Operating System on Raspberry Pi (Raspberry Pi Blockset)
This example shows you how to build a standalone robot operating system (ROS) node from a Simulink® model on a Raspberry Pi® hardware board.
Featured Examples
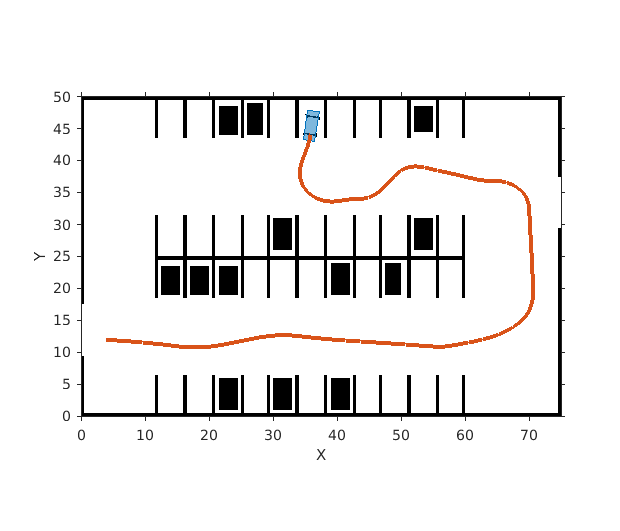
Automated Parking Valet with ROS in MATLAB
Distribute the Automated Parking Valet application among various nodes in a ROS network using MATLAB.

Automated Parking Valet with ROS in Simulink
Distribute an automated parking valet application among various nodes in a ROS network in Simulink.
Generate Automated ros_control Plugin for 3-D Shape Tracing Manipulator
Generate and deploy a 3-D shape tracing contoller as a ros_control plugin from Simulink. Perform 3-D shape tracing using UR manipulator and depth point cloud.

Generate ROS Node for UAV Waypoint Follower
Use MATLAB code generation to create a ROS node to move a UAV along a predefined circular path and a set of specified custom waypoints.

Deploy ROS Node for Sign Following Robot with Time Synchronization Using Simulink
Use Simulink® to generate a ROS stepping enabled node and control a simulated robot running on a separate ROS-based simulator.
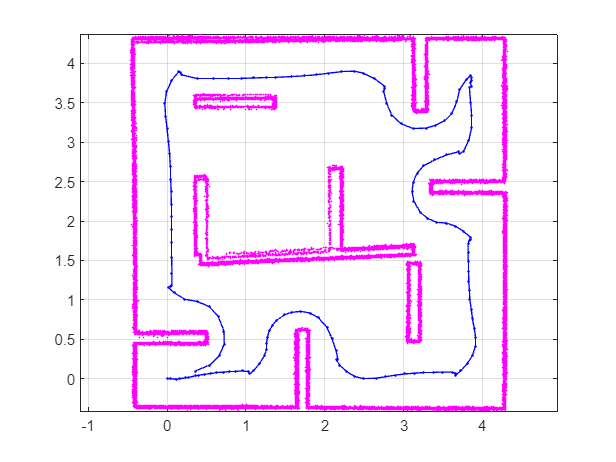
Build a Map Using Lidar SLAM with ROS in MATLAB
Use 2-D lidar data from a simulated robot in Gazebo to build a map.
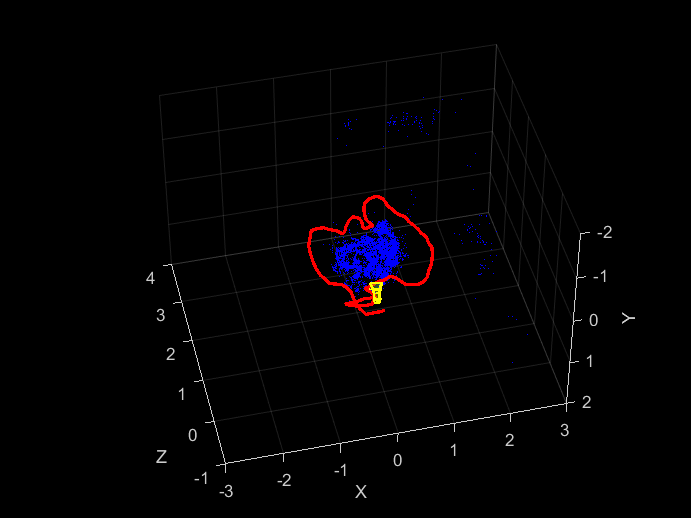
Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
In this example, you implement a visual simultaneous localization and mapping (SLAM) algorithm to estimate the camera poses for the TUM RGB-D Benchmark [1] dataset. You then generate C++ code for the visual SLAM algorithm and deploy it as a ROS node to a remote device using MATLAB®.
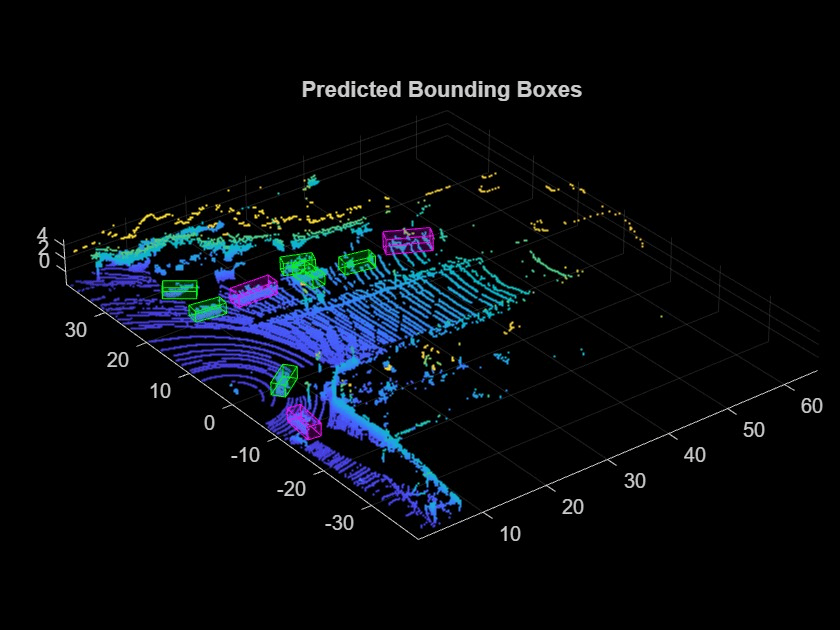
Lidar Object Detection in ROS Using PointPillars Deep Learning
Lidar Object Detection In ROS Using PointPillars Deep Learning