建模
准备 Simulink® 模型以进行硬件连接,添加模块以支持硬件协议,并浏览各种应用情形的参考示例。
模块
主题
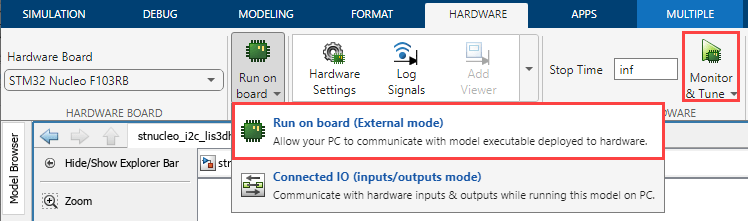
- Signal Monitoring and Parameter Tuning over XCP on Serial and TCP/IP
Use your host computer to monitor and control an application running on the target hardware.
- Communicate with Hardware Using Connected IO
Get peripheral data from the hardware before deploying the Simulink model on the hardware.
- Usage of Alternate Pin Names
Accessing multiple hardware peripherals connected to the same pin using alternate pin names.
疑难解答
Workaround for Interrupt Workflow with Sensors
This topic helps you with the workaround for interrupt workflow in sensors.
精选示例

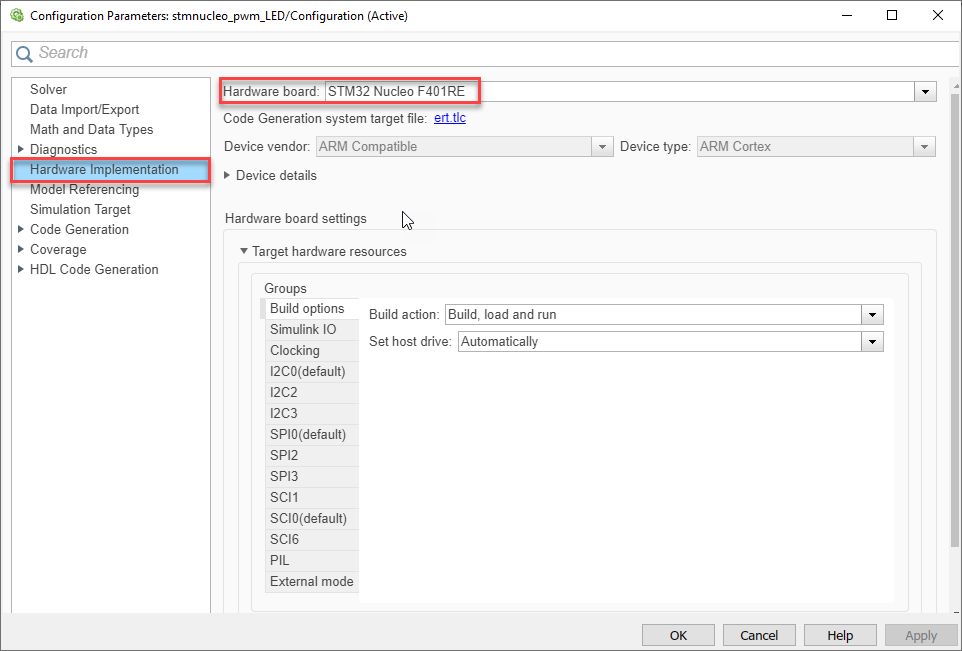
Getting Started with Simulink Coder Support Package Using STMicroelectronics Nucleo Boards
Demonstrates how to use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to run a Simulink® model on an STMicroelectronics Nucleo board.

Read Data from I2C-Based Sensors Using STMicroelectronics Nucleo Boards
Use the Simulink® Coder™ Support Package for configuring and reading data from an I2C-based sensor using an STMicroelectronics® Nucleo board.

Communicating with an SPI Based EEPROM Using the STMicroelectronics Nucleo Board
Use Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to enable and write to/ read from an SPI based EEPROM.
Change the LED Glow Intensity on STMicroelectronics Nucleo Boards
Demonstrates how to use the Simulink® Coder™ Support Package to run a Simulink model on an STMicroelectronics® Nucleo board to brighten and dim an LED.
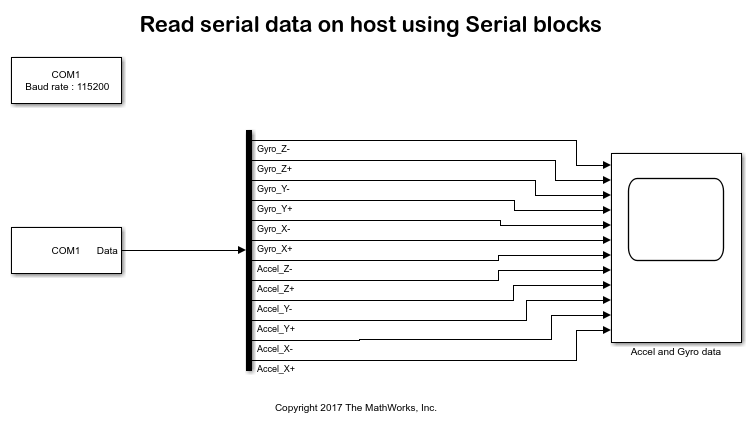
Read Accelerometer and Gyrometer Data from an STMicroelectronics Nucleo Board Using SCI Blocks
Use Simulink® Coder™ Support Package to send data to your computer from a STMicroelectronics® Nucleo board and read it using serial (SCI) blocks.

MODBUS RS485 Communication Between Client and Server Devices Using STMicroelectronics Nucleo Boards
Use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to implement a MODBUS® RS485 asynchronous, serial communication between MODBUS client and server devices. It also shows the four modes of operation: Client Read, Client Write, Server Read, and Server Write.
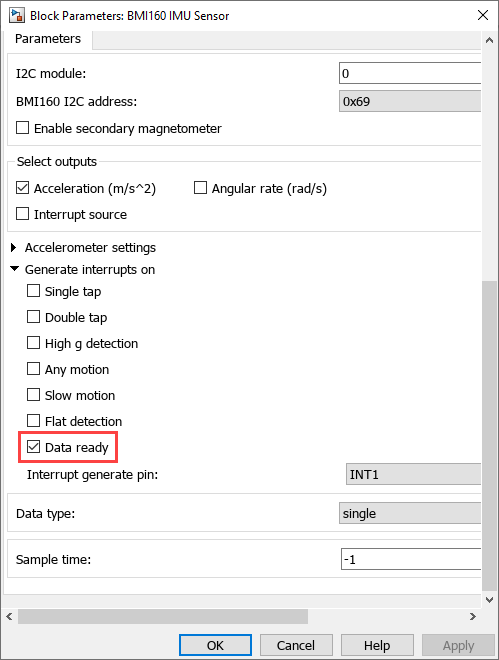
Trigger Downstream Function-Call Subsystem Using STMicroelectronics Nucleo External Interrupt Block with Data Ready Event on BMI160 Sensor
Use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to trigger a downstream function-call in Monitor and Tune action when a Data ready event occurs on BMI160 sensor using a ST Nucleo External Interrupt block. This example model for monitor and tune simulation, shows the capabilities of the External Interrupt block during data ready event on BMI160 sensor.
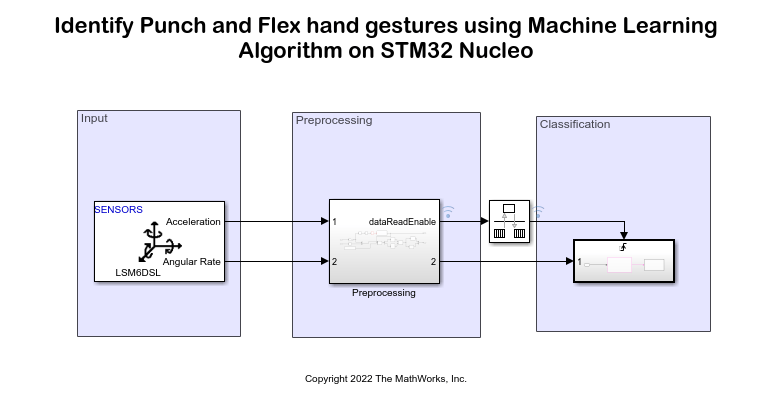
Identify Punch and Flex Hand Gestures Using Machine Learning Algorithm on STMicroelectronics Nucleo Boards
Use the Simulink® Coder Support Package for STMicroelectronics® Nucleo boards to identify punch and flex hand gestures using a machine learning algorithm. The example is deployed on an STM Nucleo board that uses an external sensor (LSM6DSL) available in sensor shield (X-NUCLEO-IKS01A2) to identify the hand gestures. The output from the machine learning algorithm, after identifying whether a hand gesture is a punch or a flex, is transmitted to the serial port where 0 represents a punch and 1 represents a flex.
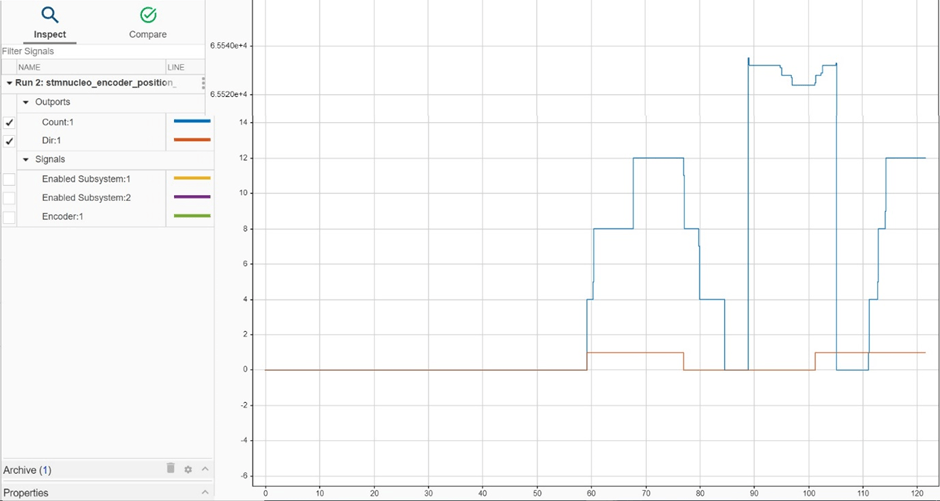
Control Rotary Encoder Knob Using STMicroelectronics Nucleo Board
Use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to control a 12-step rotary encoder with a built-in push button.
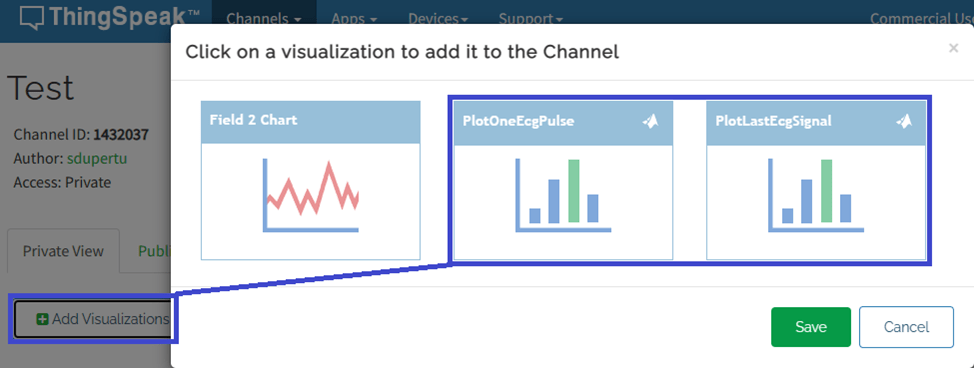
ECG Signal Processing Using STMicroelectronics Nucleo Board
Use the STM32 Nucleo F767ZI board to process an ECG signal input from an ECG sensor, extract the heart rate in beats per minutes (bpm), and send the ECG signal and heart rate to the ThingSpeak™ internet of things (IoT) analytics platform service.
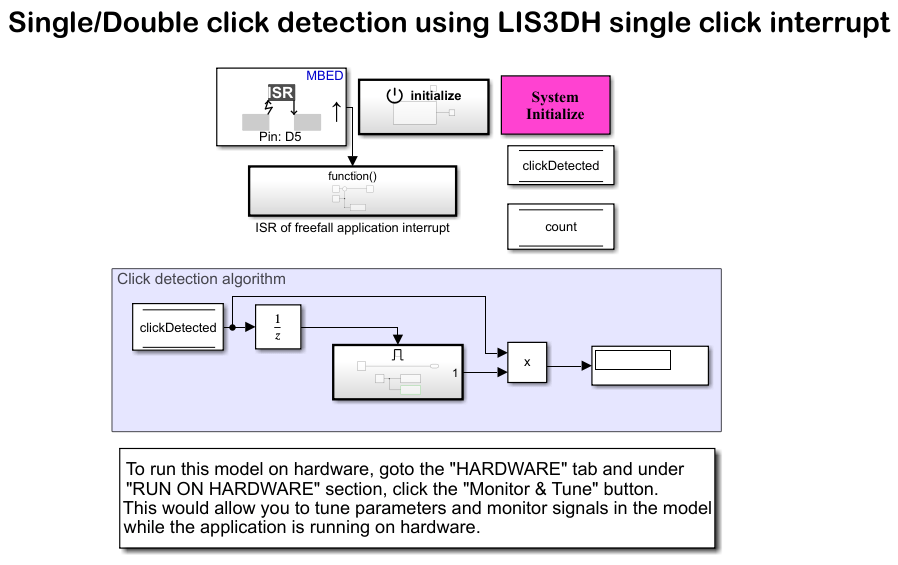
Single Click and Double Click Detection Using LIS3DH Single Click Interrupt
Use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to sense the free-fall of the sensor using the Single Click interrupt of LIS3DH linear accelerometer connected to a STMicroelectronics Nucleo board.
Free-Fall Detection Using LIS3DH Freefall Application Interrupt
Use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to sense the free-fall of the sensor using the Inertial freefall application interrupt of LIS3DH linear accelerometer connected to a STMicroelectronics Nucleo board.
Impact Detection Using LIS3DH Inertial Wakeup Interrupt
Use the Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards to sense the impact of the sensor using the Inertial wake-up interrupt of LIS3DH linear accelerometer connected to a STMicroelectronics Nucleo board.
Triple-Axis Tilt Calculation Using LIS3DH FIFO Data Ready Interrupt
Use the FIFO data ready interrupt of LIS3DH linear accelerometer connected to a STMicroelectronics® Nucleo board to sense the tilt of the sensor. This is done using a downstream function-call subsystem that reads acceleration values from FIFO buffer sensor.