Inertial Sensor
Measure orientation, acceleration, and angular rate
Add-On Required: This feature requires the Simulink Coder Support Package for VEX EDR V5 Robot Brain add-on.
Libraries:
Simulink Coder Support Package for VEX EDR V5 Robot Brain /
Sensors
Description
Add-On Required: This feature requires the Simulink Coder Support Package for VEX EDR V5 Robot Brain add-on.
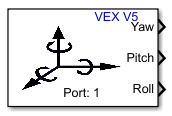
The Inertial Sensor block reads data from the Inertial sensor that is connected to the VEX® V5 Brain.
By default, the block outputs yaw, pitch, and roll (as Euler angles following the
3-2-1 convention). The block also outputs the quaternion, angular rate, and
acceleration. The block returns the angular rate and acceleration as 3-by-1 double
vector in x-y-z order and quaternion is returned as 4-by-1
double.
The VEX V5 inertial sensor auto-detects and adjusts for the mounting position. This allows the sensor to output the same orientation (Euler angles) even when the sensor is mounted upside down. For more information, see Using the V5 Inertial Sensor.
The sensor takes about 2 seconds for calibration when you start a program. Ensure that the inertial sensor is kept steady on a level surface while starting the program.
Note
When the sensor is placed on a level surface and if the pitch or roll angles show errors (of more than 1 degree), then you might need to calibrate the accelerometer.
Ports
Output
Parameters
Select the smart port on the V5 robot to which the VEX V5 inertial sensor is connected. There are 21 smart ports on the V5 robot.
Assign a unique smart port for each block in the model. If you use multiple Inertial Sensor blocks with the same port, the last Inertial Sensor block executed might be the only block that is active.
Specify the sample time in seconds to determine how often the block reads
values from the sensor. When you specify this parameter as
-1, Simulink® determines the best sample time for the block based on the
block context within the model.
Select Outputs
Select the Quaternion parameter to enable Quat port. For more information on the Quat port, see Quat.
Data Types: double
Select the Angular rate (deg/s) parameter to enable Ang rate port. For more information on the Ang rate port, see Ang rate.
Select the Acceleration (m/s^2) parameter to enable Accel port. For more information on the Accel port, see Accel.
Select the Calibration Status parameter to enable Status port. For more information on the Status port, see Status.
Additional Options
Specify if the yaw mode has to be reset by external signal or not.
No reset– The block does not reset the inertial sensor reading and outputs the total angle of rotation.For example, at T = 1 in the table the inertial sensor rotates 20 degrees in a counterclockwise direction,so, the output is 20.
Between T = 1 and T = 2, the inertial sensor rotates 10 degrees in a counterclockwise direction. Therefore, the yaw rotation is 30 at T = 2 (20 from T = 1 and 10 from T = 2).
In this reset mode, the output at any time instant is a cumulative sum of the previous yaw rotation and the current yaw rotation.
Reset by external signal– The inertial sensor reading is reset to 0 based on the input value toRstport. When you send a value other than 0 to the block input, the inertial sensor reading is reset to 0. For each sample period, the block outputs the inertial sensor reading since the last reset.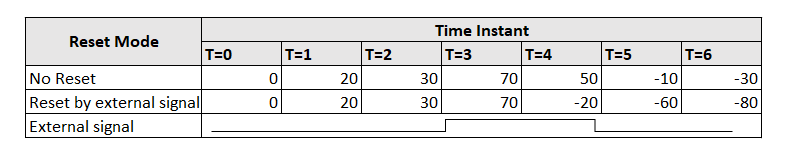
Dependencies
To enable this parameter select Euler Angles parameter.
Specify the yaw angle limit for the inertial sensor.
Set the parameter to one of these values:
0 to 360 -- The yaw angle rolls over to 0
after reaching 360 degrees.
-180 to 180 -- The yaw angle rolls over to
-180 degrees after reaching 180 degrees.
No wrap around-- The yaw angle can go over
360 degrees.
Dependencies
To enable this parameter select the Euler Angles parameter.
Extended Capabilities
Version History
Introduced in R2021a