建模
准备 Simulink® 模型以进行硬件连接,添加模块以支持硬件协议,提供各种应用情形的参考示例。
模块
主题
- Model Configuration Parameters for VEX EDR V5 Robot Brain
Parameter and configuration options for creating and running applications on VEX EDR V5 Robot Brain.
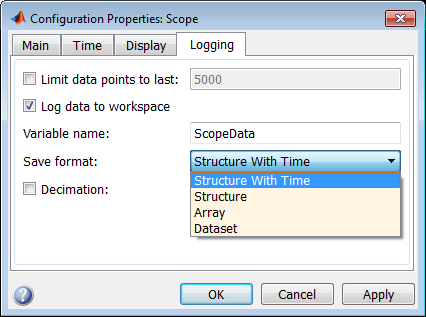
- Log Signals on an SD Card
Log signals from Simulink models on an SD card mounted on the target hardware.
- Creating Touch Screen Controls and Displays for VEX V5 Robot Brain
Deploy Display and Push button Dashboard blocks on VEX EDR V5 Robot Brain.
- Monitoring Signals for Gyroscope Calibration Using the VEX V5 Touch Screen
Monitor signals for Gyroscope calibration using the VEX V5 Robot Brain.
- Simulate a VEX Robot with Simulink and Gazebo
Model robot’s control algorithm in Simulink and simulate the robot in Gazebo.
- Set Up Gazebo Simulation Environment
Model robot’s control algorithm in Simulink and simulate the robot in Gazebo.
- Transitioning from Gazebo Simulation to Deployment
Transition programming to the actual robot.
- Troubleshooting Gazebo Simulation
Solve the problems that you might encounter while simulating a model in Gazebo simulation environment.
精选示例
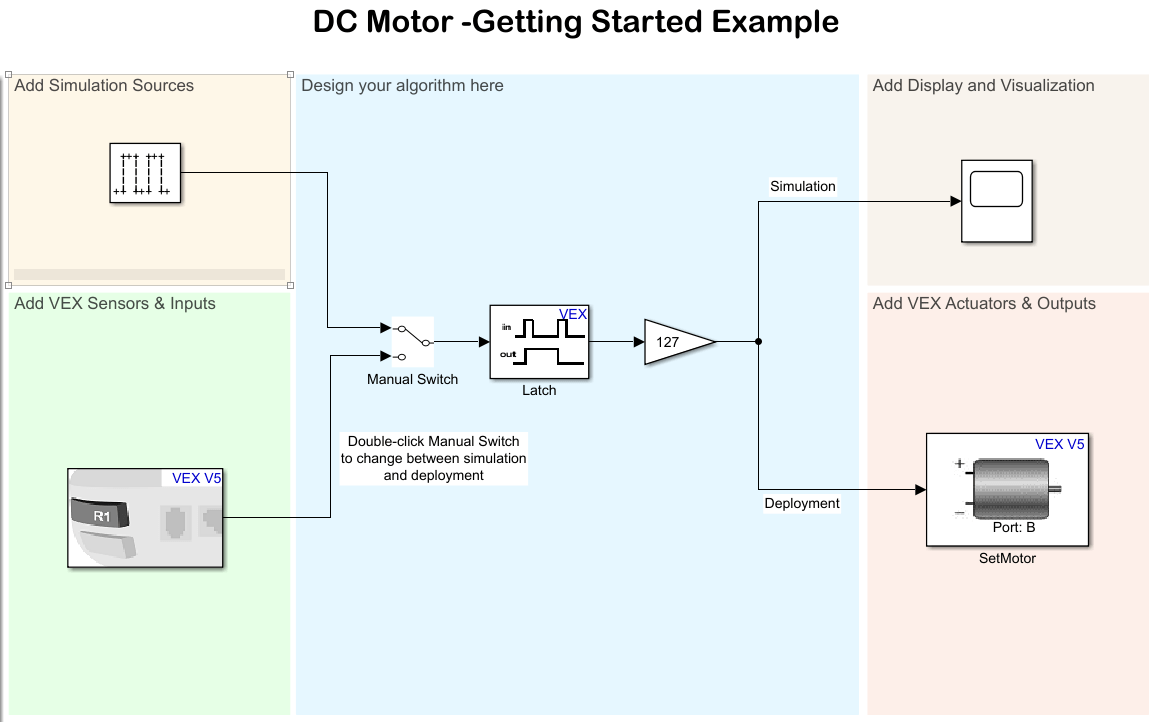
Getting Started with Simulink Coder Support Package for VEX EDR V5 Robot Brain
Use Simulink® Coder™ Support Package for VEX® EDR V5 Robot Brain to run a Simulink model on a VEX V5 Robot Brain.
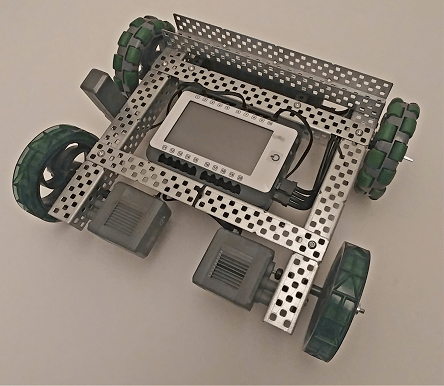
Tank Robot Control Using V5 Smart Motor and V5 Controller Joystick
Use the Simulink® Coder™ Support Package for VEX® EDR V5 Robot Brain to control a two-wheeled tank robot using two V5 Smart Motors and the joystick on the V5 Controller gamepad.
Servo Control Using a V5 Controller Button
Use Simulink® Coder™ Support Package for VEX® EDR V5 Robot Brain to control a servo motor using a button on V5 Controller gamepad.
Parameter Tuning and Signal Logging with Serial External Mode
Perform parameter tuning and data logging with a Simulink® model running in External mode on VEX® EDR V5 Robot Brain.
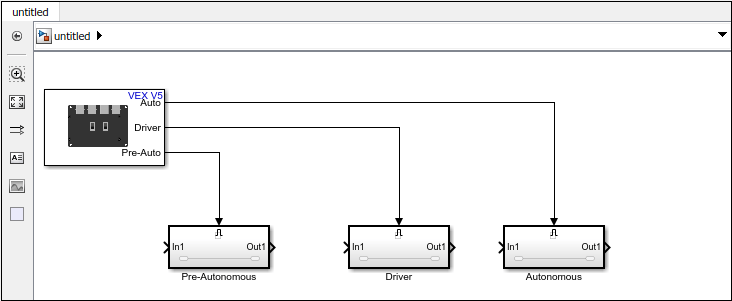
Autonomous Mode and Driver Mode with VEX EDR V5 Robot Brain
Use Simulink® Coder™ Support Package for VEX® EDR V5 Robot Brain to implement Pre-Autonomous, Autonomous, and Driver Controlled modes in the same Simulink model.
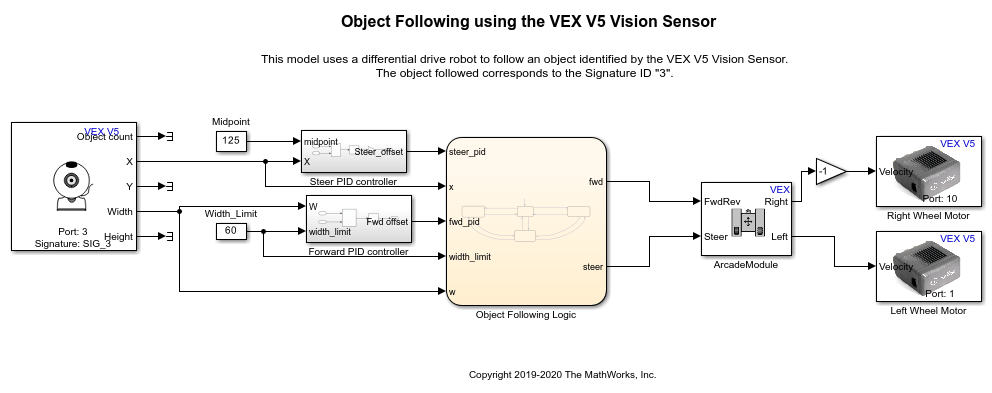
Follow a Colored Object Using VEX V5 Vision Sensor
Use Simulink® Coder™ Support Package for VEX® EDR V5 Robot Brain to control a robot in arcade mode by following a colored object detected by a V5 Vision Sensor.
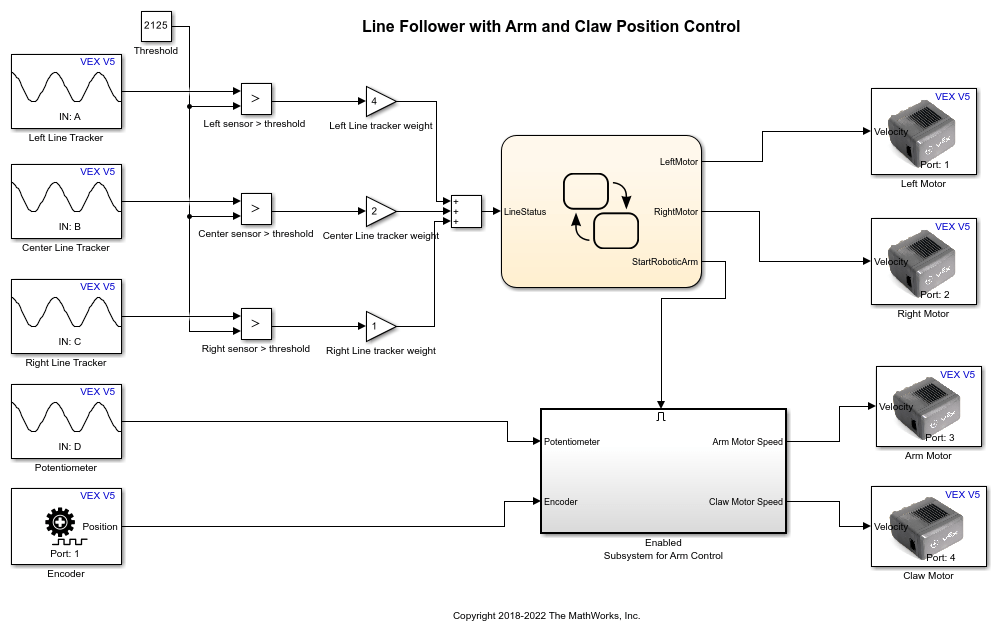
Line Follower with Arm and Claw Position Control Using Line Tracker and Potentiometer
Use Simulink® Coder™ Support Package for VEX® EDR V5 Robot Brain to create a line follower robot with a robotic arm and claw control using the VEX Clawbot. The robot, with an object manually placed between its claw, follows a black line on a white surface. When the end of the black line is reached, which is indicated by a wider black line, the robot stops, lowers the robotic arm and drops the object held between its claws. Three VEX Line Trackers will be used for the purpose of following a black line, a potentiometer for the control of robotic arm position, and the in-built encoder of V5 Smart Motor for the control of the claw opening.

Select Different Robot Autonomous Modes Using the VEX V5 Robot Brain
Use Simulink® Coder™ Support Package for VEX® V5 Robot Brain and create custom user interfaces on the LCD touch screen of VEX V5 Robot Brain using Display and Push Button Simulink Dashboard blocks.
Heading Control Using VEX V5 Inertial Sensor
Use the VEX® V5 Inertial Sensor block for heading control of VEX V5 robot.
Follow Square Trajectory Using Differential (Tank) Drive
Use the Differential (Tank) Drive block for controlling the VEX® V5 robot to follow a square trajectory.
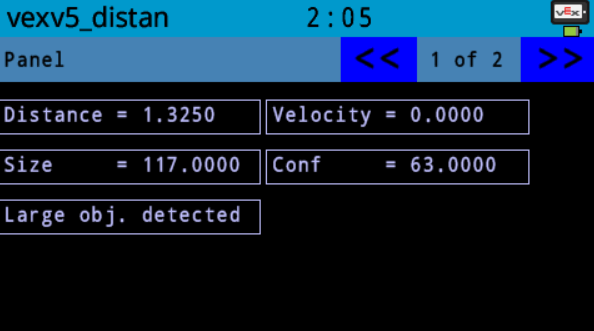
Getting Started with VEX V5 Distance Sensor
Use the Simulink® Coder™ Support Package for VEX® V5 Robot Brain to run a Simulink model with Distance Sensor block on a VEX V5 Robot Brain. This example helps you to determine the distance, velocity, and relative size of object using distance sensor.
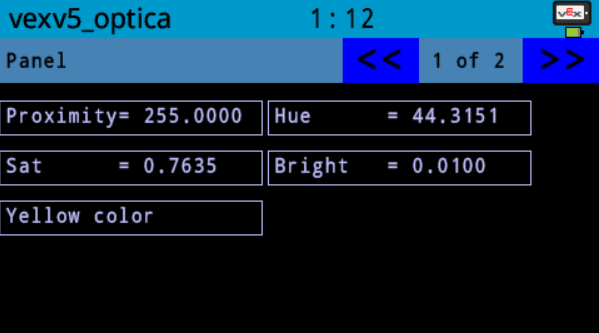
Getting Started with VEX V5 Optical Sensor
Use a VEX® V5 Optical sensor with Simulink® Coder™ Support Package for VEX® V5 Robot Brain. It illustrates how to obtain proximity and color readings in HSB scale. It uses a Stateflow® chart to check if a particular color is being detected or not.
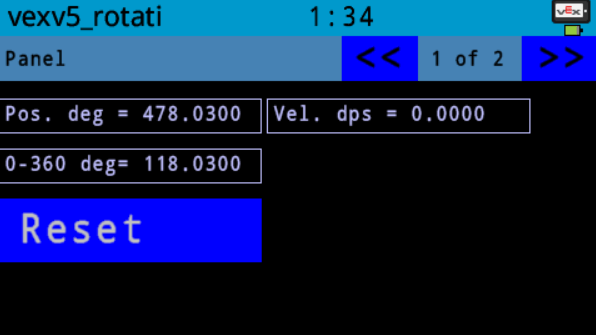
Getting Started with VEX V5 Rotation Sensor
Use a VEX® V5 Rotation Sensor with Simulink® Coder™ Support Package for VEX V5 Robot Brain. This example illustrates how to read angular position and velocity of a shaft connected to rotation sensor. Also, it demonstrates how to use a 'Math Function (mod)' for wrapping angle from 0 to 360 degrees.
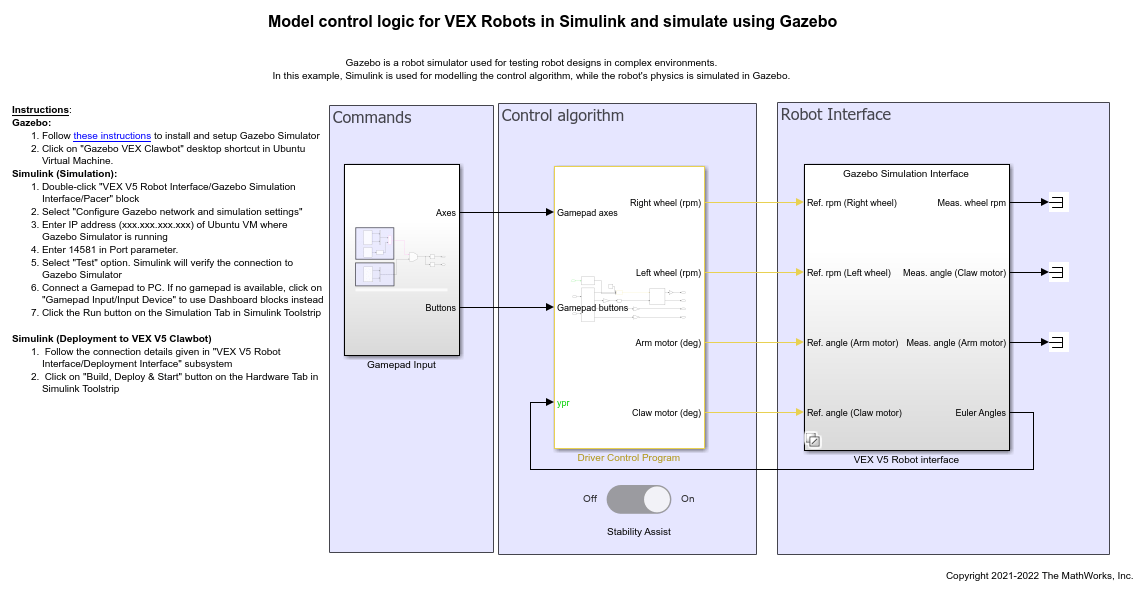
Simulate Stability Assistance Algorithm Using Gazebo Simulator for VEX V5 Robot
Model a robot's control algorithm in Simulink® and simulate the robot using Gazebo simulator. A VEX® V5 Robot is preconfigured in Gazebo Simulator along with a virtual world. The control algorithm is modeled in Simulink and the model is interfaced using Gazebo Co-simulation blocks. This example also allows you to perform stability assistance while lifting heavy objects using feedback from an IMU sensor.
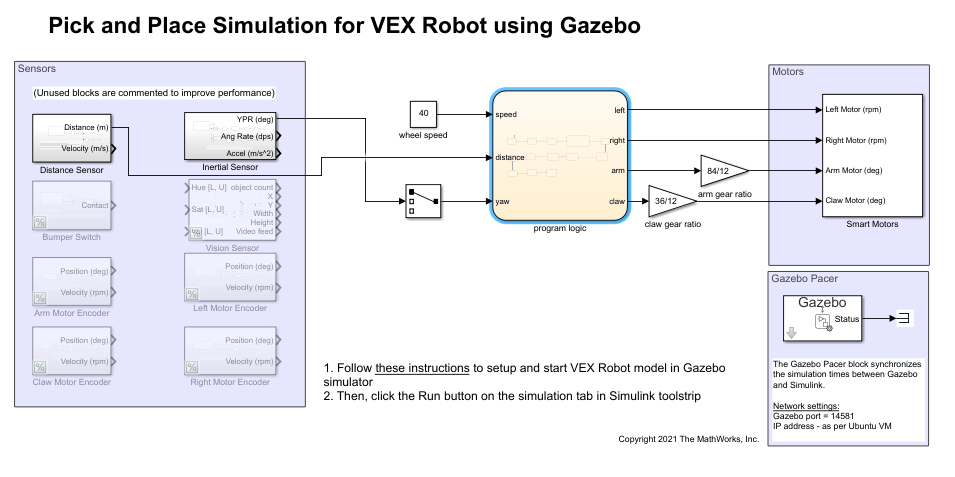
Pick-and-Place Simulation for VEX Robot Using Gazebo Simulator
Model the pick-and-place algorithm for a VEX® robot and then simulate the robot in a Gazebo simulator. This example uses a pre-configured Simulink® model created for Gazebo simulator (along with a virtual world). The robot's control algorithm is modeled as a Stateflow® chart in Simulink. Simulink reads data from sensors and writes commands to motors in Gazebo using Gazebo co-simulation blocks.
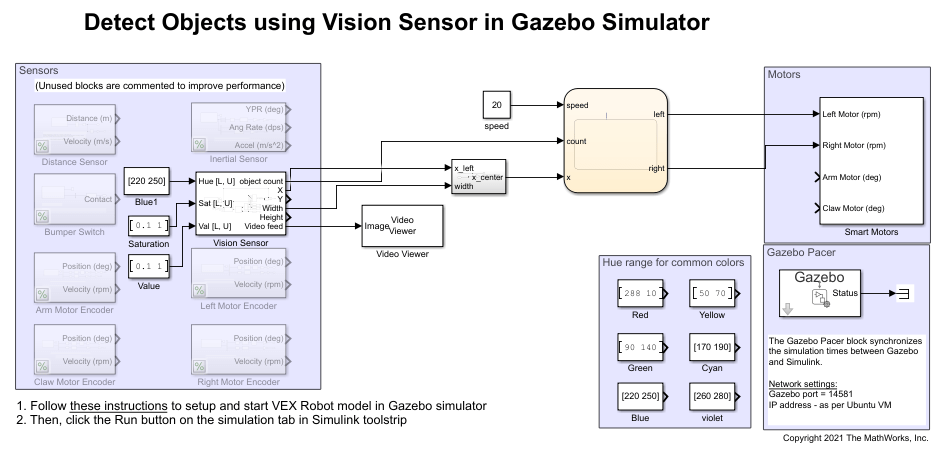
Detect Objects Using Vision Sensor in Gazebo Simulator
Use a simulated vision sensor to detect colored objects in the field and perform actions based on it. This example uses a pre-configured Simulink® model created for Gazebo simulator (along with a virtual world). The robots control algorithm is modeled as a Stateflow® chart in Simulink. Simulink reads data from sensors and writes commands to motors in Gazebo using Gazebo co-simulation blocks.
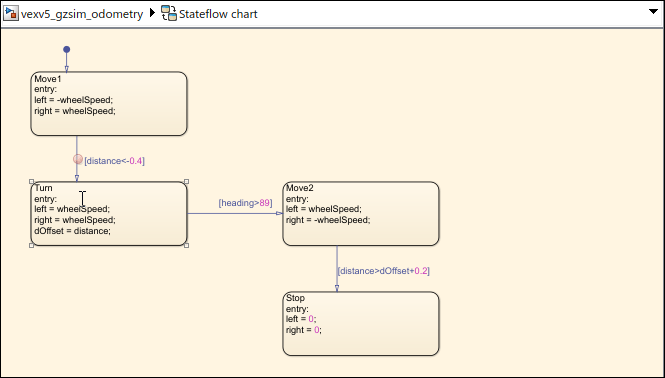
Navigating VEX Robot with Wheel Odometry in Gazebo Simulator
Simulate a robot moving from one point to another using wheel encoders. This example has a model of VEX® robot created for Gazebo simulator (along with a virtual world). The robot's control algorithm is modeled as a Stateflow® chart in Simulink®. Simulink reads data from sensors and writes commands to motors in Gazebo using Gazebo co-simulation blocks.
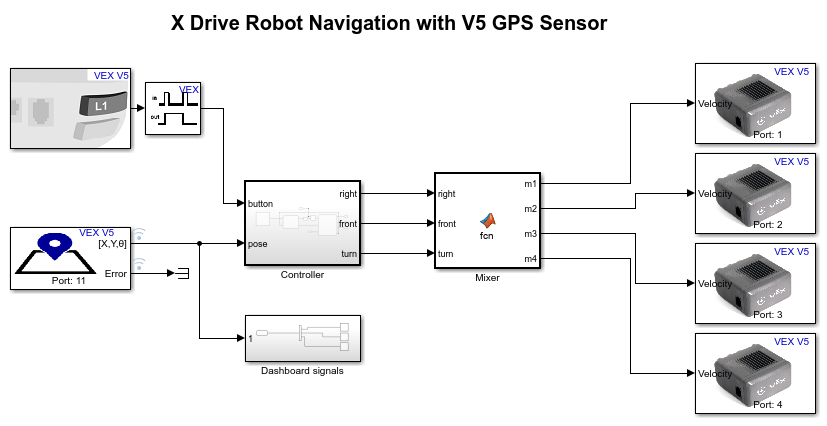
X-Drive Robot Navigation with VEX V5 GPS Sensor
Use a VEX® V5 GPS Sensor with Simulink® Coder™ Support Package for VEX V5 Robot Brain and control the robot to follow a set of waypoints.