柔性体应用
使用 Simscape™ Driveline™ 可对轴的扭转和横向柔度进行建模。这些示例演示了 Flexible Shaft 模块的用法。
精选示例
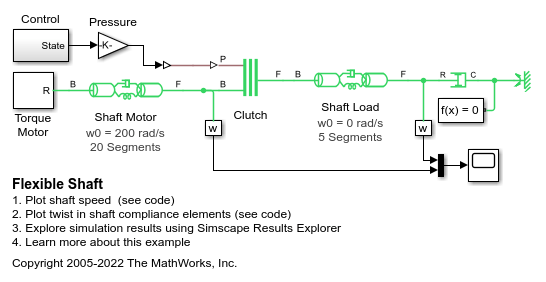
Flexible Shaft
Two flexible aluminum shafts modeled using a lumped parameter approach. Both shafts consist of 20 segments containing inertias, damping, and stiff torsional springs. At the start of the simulation, the clutch is unlocked and the driven shaft is free. Note that the initial velocity of the motor shaft is set to 200 rad/s and that the system starts at steady state. The clutch engages and disengages during the test, and during each event the effect of the shaft flexibility can be seen in the simulation results.
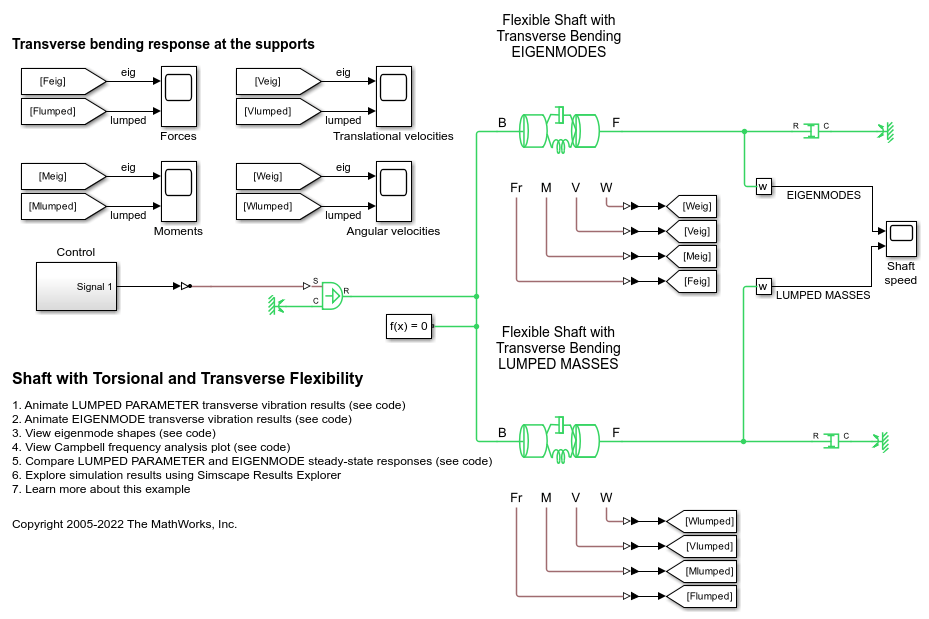
Shaft with Torsional and Transverse Flexibility
Two flexible shafts that have torsional and transverse flexibility. One shaft computes transverse motion using computed eigenmodes, and the other shaft uses a lumped parameter approach. The boundary conditions on the shafts can be changed on the block masks.