构建模型并可视化结果
此示例展示了如何创建和运行生成绘图输出的简单模型。Simscape™ Driveline™ 模块属于机械旋转域或机械平移域。使用 Simscape Driveline 模块创建模型,对模块进行参数化以更改模型功能,然后可视化结果。然后可以使用传感器模块来可视化物理数据。
此示例使用旋转机械域中的模块,但其中的原理也适用于创建平移系统模型。您可以先使用简单或理想的输入和物理特性来验证模块的行为是否符合预期,然后再将其添加到更复杂的模型中。这些模块使用系统输入值执行计算,以表示其自身的物理特性。要了解有关模块方程和参数的详细信息,请参阅模块的参考页。
构建机械旋转模型
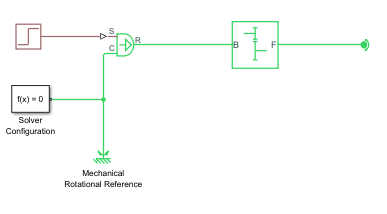
您可以打开一个 Simulink® 画布,其中包含有助于在机械旋转域进行建模的模块和链接。在 MATLAB® 窗口中,点击 Simulink 按钮打开 Simulink 起始页。在新建选项卡下,导航到 Simscape,然后点击创建模型,选择机械旋转。机械平移域和机械旋转域各自有自己的参考模块。在此模型中,Mechanical Rotational Reference 模块定义了一个零运动和零方向的点。Simscape 相对于此参考坐标系定义连接的模块。
画布中包含连接到 Mechanical Rotational Reference 模块的 Solver Configuration 模块。双击画布,将以下 Simscape 和 Simscape Driveline 模块添加到模型中:
请按照以下步骤构建模型:
将 Ideal Angular Velocity Source 模块的端口 C 连接到 Mechanical Rotational Reference 模块。
将 Ideal Angular Velocity Source 模块的端口 R 连接到 Simple Gear 模块的端口 B。
将 PS Step 模块连接到 Ideal Angular Velocity Source 模块的端口 S。然后双击 PS Step 模块,并将最终值设置为 10。
将 Simple Gear 模块的端口 F 连接到 Rotational Free End 模块。
删除 Simulink-PS Converter 模块。您可以暂时保持 PS-Simulink 模块和 Scope 模块与模型断开连接的状态。
您可以通过右键点击模块并选择 格式 > 顺时针旋转,或按 CTRL+R 来旋转画布上的模块。要了解有关与模型画布交互的详细信息,请参阅配置模型布局。将模型另存为 myModel。
该模型是没有摩擦、质量或动态力的理想模型,因此 Ideal Angular Velocity Source 模块不需要扭矩即可使系统进入稳态。
Simple Gear 模块的默认从端与基端比为 2:1。要更改减速比,请双击该模块,并将从端(F)与基端(B)齿数比(NF/NB) 设置为 3。
使用传感器模块将数据输出到 Scope 模块
您可以使用传感器模块来跟踪一个或多个模型变量,并使用 Scope 模块来可视化传感器数据。传感器模块是理想模块,不会对您的模型产生任何物理影响。以下平移和旋转传感器模块包含在 Simscape Foundation 库中:
Translational Power Sensor
Rotational Power Sensor
Ideal Translational Motion Sensor
Ideal Rotational Motion Sensor
Ideal Force Sensor
Ideal Torque Sensor
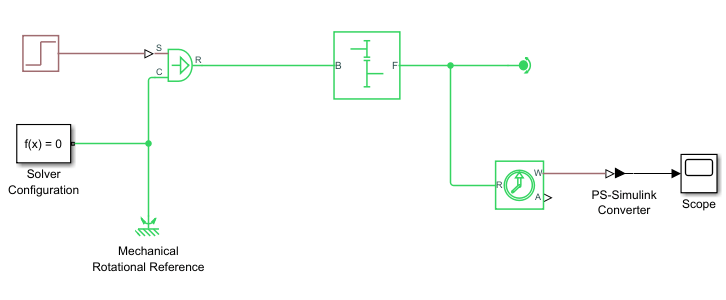
要查看 Simple Gear 模块的输出轴转速,请按下图所示将 Ideal Rotational Motion Sensor 模块和 Scope 模块附加到模型。传感器模块输出的是物理信号,因此您必须在 Scope 模块和 Ideal Rotational Motion Sensor 模块的端口 W 之间使用一个 PS-Simulink Converter 模块。双击 Ideal Rotational Motion Sensor 模块,并将测量参考设置为绝对。将 Simple Gear 模块与 Rotational Free End 模块之间的信号进行分支,并将其连接到传感器的端口 R。
从 Scope 模块运行模型以生成结果。
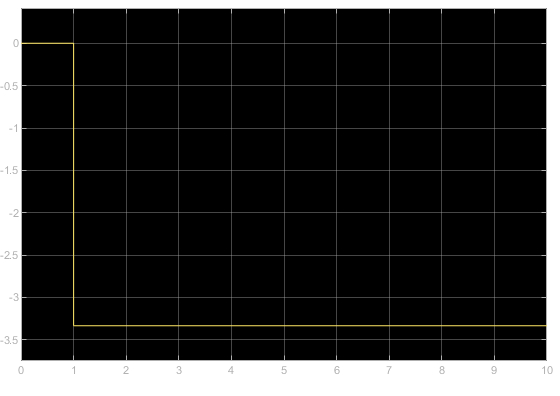
轴在阶跃输入后达到大约 3.3 的恒定旋转速度。输出转速是 PS Step 模块的输入幅值 10 的三分之一。如前文所述,由于系统没有质量或摩擦,因此启动时不需要扭矩。请注意,将输出轴旋转方向设置为与输入轴反向时,端口 F 的旋转方向与端口 B 相反。
要打开已完成的模型,请输入:
openExample('sdl/SimpleRotationalMechanicalSystemExample')另请参阅
How Simscape Models Represent Physical Systems | 为模型设置模型配置参数 | 配置模型布局 | Simple Gear