Nonlinear Rotational Damper
Nonlinear damper in a rotational system

Libraries:
Simscape /
Driveline /
Couplings & Drives /
Springs & Dampers
Description
The Nonlinear Rotational Damper block represents a nonlinear rotational damper. Polynomial and table lookup parameterizations define the nonlinear relationship between damping torque and relative angular velocity. The damping torque can be symmetric or asymmetric about the zero velocity point. The block applies equal and opposite damping torques on the two rotational conserving ports.
The symmetric polynomial parameterization defines the damping torque for both positive and negative relative velocities according to the expression:
where:
T — Damping torque
b1, b2, ..., b5 — Damping coefficients
ω — Relative angular velocity between ports R and C,
ωR — Absolute angular velocity associated with port R
ωC — Absolute angular velocity associated with port C
To avoid zero-crossings that slow simulation, eliminate the sign function from the polynomial expression by specifying an odd polynomial (b2,b4 = 0).
The two-sided polynomial parameterization defines the damping torque for both positive and negative relative velocities according to the expression:
where:
b1p, b2p, ..., b5p — Damping coefficients for positive relative velocities
b1n, b2n, ..., b5n — Damping coefficients for negative relative velocities
Both polynomial parameterizations use a fifth-order polynomial expression. To use a lower-order polynomial, set the unneeded higher-order coefficients to zero. To use a higher-order polynomial, fit to a lower-order polynomial or use the table lookup parameterization.
The table lookup parameterization defines damping torque based on a set of torque and angular velocity vectors. If not specified, the block automatically adds a data point at the origin, that is, the intersection of zero angular velocity and zero torque.
Assumptions and Limitations
The block assumes viscous damping. The damping force depends only on velocity.
Examples
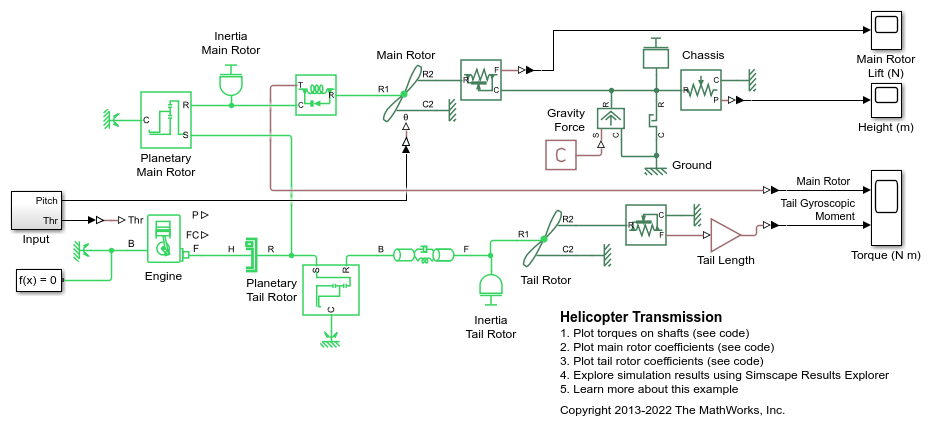
Helicopter Transmission
A fixed helicopter transmission testbed. The gasoline engine provides power that is sent to the main and tail rotors through planetary gearsets. The main rotor shaft is considered rigid, and flexibility is modeled in the longer, thinner tail rotor shaft. Blade pitch angle is set directly via a physical signal. Swash plate dynamics can be added using the appropriate blocks in Simscape™ Fluids™. The engine stalls after six seconds, but lift is maintained for some time through the unidirectional clutch. This scheme also allows autorotation of the main rotor in a descending helicopter.

Four-Wheel Drive Testbed
A four-wheel drive vehicle with open and limited slip differentials. The front and rear differentials can be standard or Type I Torsen. The center differential can be a solid shaft, viscous coupling, viscous coupling with a locking clutch, or open with no torque transfer. The differential options are in variant subsystems. The variants can be selected using the hyperlinks embedded in the model.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2013a