Battery CC-CV

库:
Simscape /
Battery /
BMS /
Current Management
描述
Battery CC-CV 模块实现电池的恒流 (CC) 和恒压 (CV) 充电算法。对于放电电池,该模块使用 CurrentWhenDischarging 输入端口的值。要实现带比例控制的更简单的 CC-CV 充电算法,请参阅 CC-CV Charging (Proportional Control) 模块。
此模块支持单精度和双精度浮点仿真。
注意
要启用继承的单精度浮点仿真,除采样时间(-1 表示继承) 参数外,所有输入和参数的数据类型必须为 single。
您可以使用采样时间(-1 表示继承) 参数在模块的连续实现和离散实现之间进行切换。要将模块配置为连续时间模式,请将采样时间(-1 表示继承) 参数设置为 0。要配置离散时间模块,将采样时间(-1 表示继承) 参数设置为正值且不为零,或设置为 -1 以从上游模块继承采样时间。
注意
此模块的连续时间实现仅适用于双精度浮点仿真。如果您提供单精度浮点参数和输入,此模块会将它们转换为双精度浮点值,以防止出现错误。
此图说明了模块的整体结构:
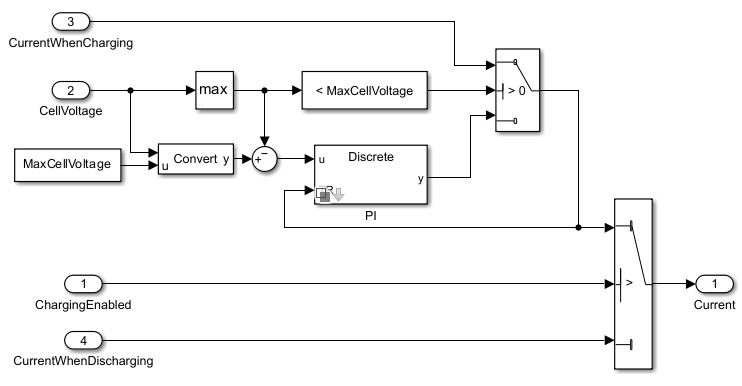
方程
此模块在恒流和恒压模式下实现 CC-CV 算法。该图展示了这些模式的运行方式:

此方程式定义了模块输出的电池参考电流:
其中
vmax 是电芯电压阈值(V) 参数的值。
vmeas 是最高电芯的电压。
Kp 和 Ki 是控制器比例增益和控制器积分增益参数的值。
示例

电池充电与放电
此示例说明了如何使用恒流和恒压算法对电池进行充电和放电。Battery CC-CV 模块正在对电池进行 10 小时的充电和放电。初始荷电状态 (SOC) 等于 0.3。当电池充电时,电流保持恒定,直到电池达到最大电压,然后电流逐渐减小至 0。当电池放电时,模型使用恒定电流。
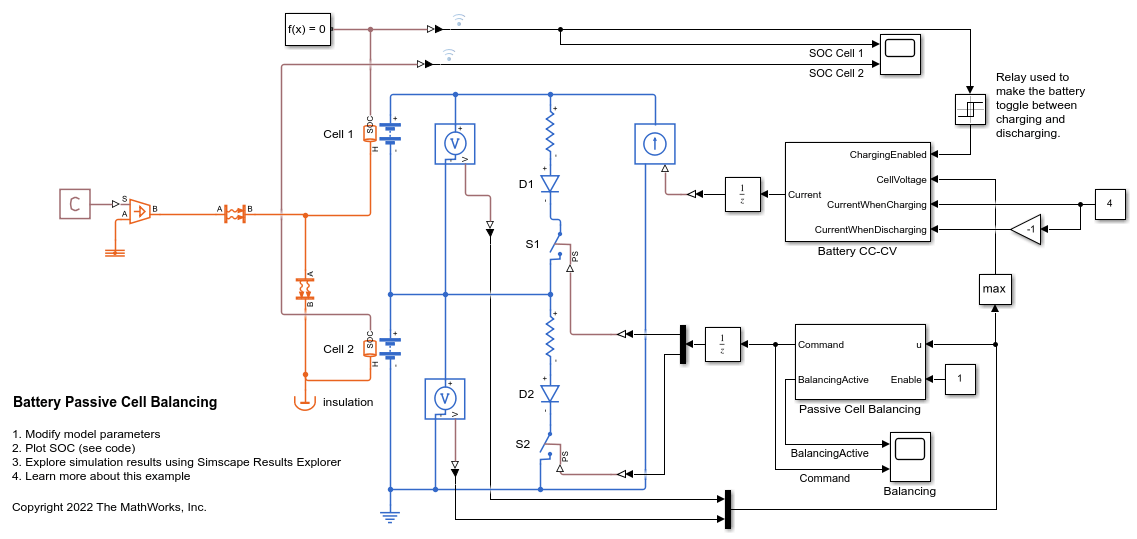
电池被动电芯平衡
此示例说明了如何使用无源电芯平衡算法平衡两个串联连接的电池电芯。两个电芯的初始荷电状态 (SOC) 分别为 0.7 和 0.75。平衡程序取决于电芯电压。或者,您可以使用 SOC 值进行平衡。当平衡功能激活时,放电电阻器打开,对电芯进行放电。您可以使用电池包模型构建器中的对象和函数来生成更复杂的电池包。
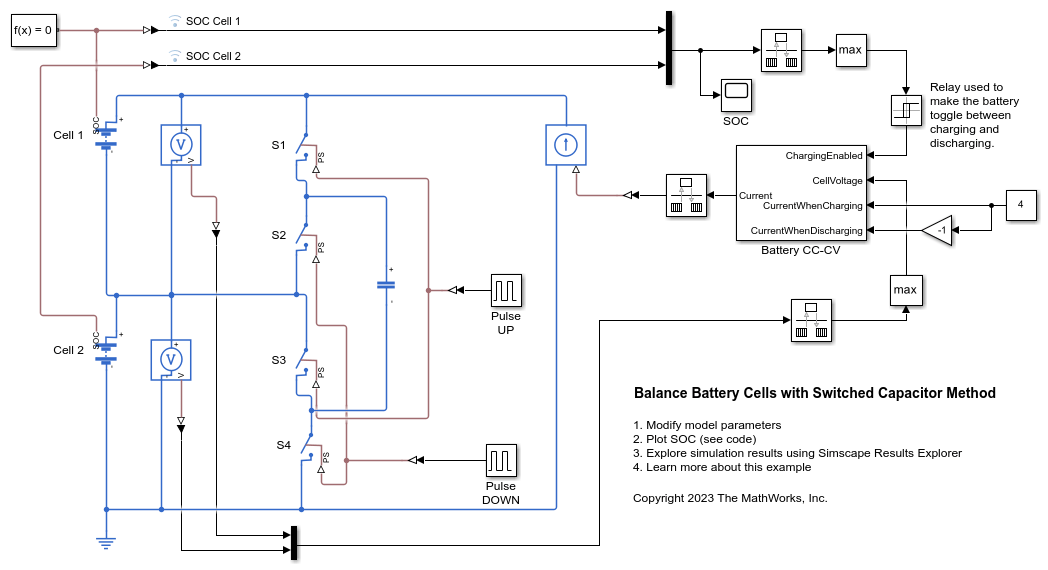
用开关电容法平衡电池电芯
此例说明如何使用开关电容器 (SC) 策略进行主动电芯平衡,以平衡两个串联电池电芯的电池。为了在电池电芯之间传输能量,该方法使用电容器作为外部能量存储元素。为了平衡 N 个电芯,SC 方法需要 N-1 个电容器和 2*N 个双向开关。控制策略只有两种状态,可在充电和放电模式下工作。一个电芯的初始荷电状态 (SOC) 为为 0.7,另一个为 0.75。要生成更详细的电池包,请使用电池包模型构建器中的对象和函数。

带冷却液控制的充放电模组组件
此示例说明了如何在监测电芯温度并启用冷却功能的同时,对电池模组组件进行充电和放电循环。
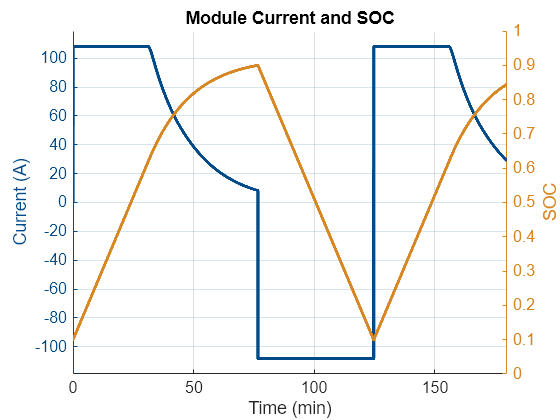
对电池模组进行受控充电和放电
此示例说明了如何使用 Battery CC-CV 模块对电池模组执行循环充电和放电配置文件。仿真开始时,电池模组的荷电状态 (SOC) 为 10%。Battery CC-CV 模块执行恒流 (CC) 充电,直到达到最大电芯电压 (V) 参数中指定的 4.1 V 的极限电芯电压。然后,该模块以恒定电压 (CV) 配置文件为电池充电,直到模组 SOC 达到 90%。最后,该模块启动 CC 放电程序,并使模组放电直至 SOC 达到初始值 10%。充电和放电循环随后重新开始。