Angular Velocity Actuator (AB)
Ideal velocity actuator that maintains relative angular velocity proportional to the input signal
Since R2026a

Libraries:
Simscape /
Foundation Library /
Rotational /
Sources
Description
The Angular Velocity Actuator (AB) block represents an ideal actuator that maintains a specified relative angular velocity regardless of the load at the connected ports. The actuator has a relative angle between its ports.
B and F are angle-based rotational conserving ports. The physical signal at port S specifies the relative angular velocity between the ports B and F. A positive signal at port S indicates that the velocity at port F is greater than at port B. For positive relative angle, port F has a more positive angle than port B.
The block logs these variables:
t— torque that port B applies to port F to maintain the specified relative angular velocity.w_rel— relative angular velocity between ports, specified by the signal at port S, , where ωB and ωF are the angular velocities of ports B and F, respectively.
For more information, see Data Logging.
The relative angle between the actuator ports is , where θB and θF are the angles of ports B and F, respectively.
The block has no parameters. You specify the relative angle between the ports as an initial variable target.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
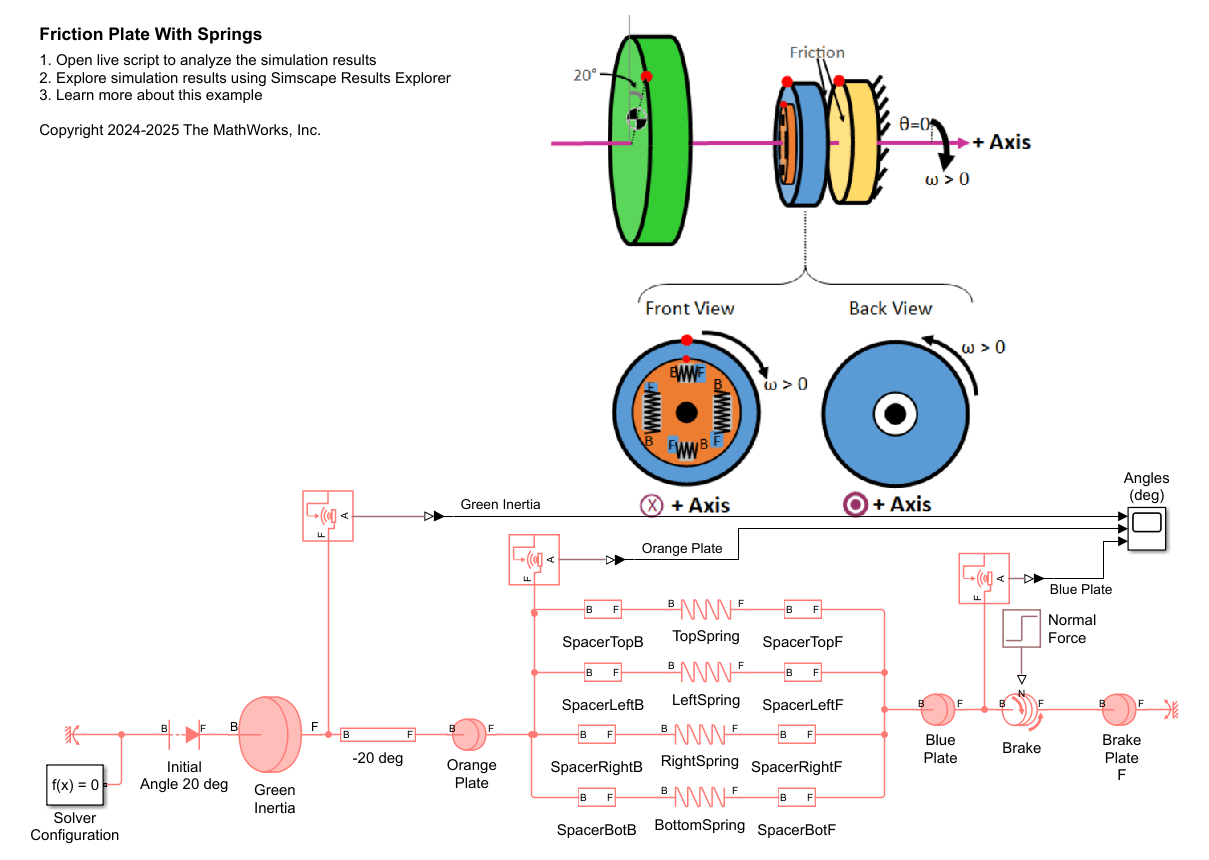
Interpreting Angle in the Angle-Based Rotational Domain
Set up and interpret angles in angle-based rotational models. It provides background information to explain the underlying concepts. The angle-based rotational domain tracks angle, θ, and rotational velocity, ω, at every node. Use angle-based rotational blocks to model rotational systems where knowing multiple component angles is important.
Ports
Input
Conserving
Extended Capabilities
Version History
Introduced in R2026a